Cinematica dei Manipolatori – CINEMATICA INVERSA
100 likes | 494 Vues
Il problema cinematico inverso tratta la determinazione delle variabili di giunto assegnata la posizione e l’assetto dell’organo finale del manipolatore

Cinematica dei Manipolatori – CINEMATICA INVERSA
E N D
Presentation Transcript
Il problema cinematico inverso tratta la determinazione delle variabili di giunto assegnata la posizione e l’assetto dell’organo finale del manipolatore • La soluzione di tale problema è di fondamentale importanza per tradurre le specifiche di moto dallo spazio operativo allo spazio dei giuntiOVVERO PER POTER PROGRAMMARE IL ROBOT • Tramite l’equazione cinematica diretta posizione ed orientazione end effector sono determinati in maniera univoca. Da contro il problema cinematico inverso potrebbe non godere della suddetta proprietà per le seguenti motivazioni: • si possono avere soluzioni multiple • si possono avere infinite soluzioni (manipolatore ridondante) • le equazioni sono in generale non-lineari e non è sempre possibile determinare una soluzione analitica • possono non esistere soluzioni ammissibili (data la struttura cinematica e meccanica del manipolatore) Cinematica dei Manipolatori – CINEMATICA INVERSA
L’esistenza di soluzioni è garantita se posizione ed orientazione appartengono allo spazio di lavoro destro del manipolatore Per quanto riguarda il problema delle soluzioni multiple nel caso tridimensionale con manipolatore a 6 gradi di mobilità si hanno per ogni postura ben 16 soluzioni diverse (esempio del gomito alto/basso) La determinazione di soluzioni in forma chiusa richiede intuizione algebrica e geometrica Nel caso in cui non sia semplice arrivare alla soluzione o essa non esista in forma esplicita, è opportuno ricorrere a tecniche numeriche di soluzione. In generale non consentono di determinare tutte le soluzioni possibili Cinematica dei Manipolatori – CINEMATICA INVERSA
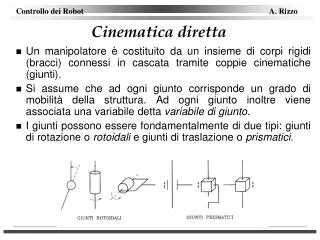
Manipolatore planare a 3 bracci: Equazione cinematica diretta Equazione cinematica Inversa? W I termini noti sono: px py Le variabili da determinare: 1 2 3 Esempio – CINEMATICA INVERSA
Provate 15’ di tempo! Cinematica dei Manipolatori – CINEMATICA INVERSA
Il problema è determinare le variabili di giunto corrispondenti a posizione ed orientamento assegnati per l’organo terminale I termini noti sono: px py Le variabili da determinare: 1 2 3 Sostituendo la terza (che esprime la somma dei tre angoli, valore noto) nelle prime due: Cinematica dei Manipolatori – CINEMATICA INVERSA
Da cui si puo ricavare2 Cinematica dei Manipolatori – CINEMATICA INVERSA
Sostituendo2 nell’equazione: Si determina un sistema algebrico di due equazioni nelle due incognite c1 e s1 che, risolto, fornisce: Da cui si ricava1 : Infine si ricava3 : Cinematica dei Manipolatori – CINEMATICA INVERSA
Per un manipolatore planare a tre bracci la soluzione non è triviale, dunque per manipolatori più complessi la soluzione può essere complessa da determinare o neppure esistere in termini espliciti Sorge quindi l’esigenza di sviluppare/apprendere tecniche numeriche di soluzione Uno strumento fondamentale per la determinazione della soluzione di equazioni non-lineari è l’operazione di derivazione … e dunque tramite la cinematica differenziale Cinematica dei Manipolatori – CINEMATICA INVERSA