Dynamic Modeling of a 2-Link Manipulator: Gravitational and Inertial Forces Analysis
430 likes | 546 Vues
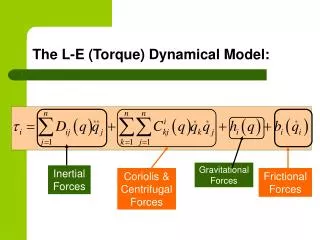
In this paper, we present a detailed Lagrangian Electromechanical (L-E) dynamical model of a two-link manipulator, focusing on gravitational, inertial, Coriolis, centrifugal, and frictional forces. We define the L-E algorithm starting with link parameters and compute transformation matrices. The inertial tensor for each link is derived using their respective properties, leading to the development of the dynamic equation D(q) for our model. Finally, we analyze the velocity coupling matrix and gravitational effects to derive accurate torque models for each link.

Dynamic Modeling of a 2-Link Manipulator: Gravitational and Inertial Forces Analysis
E N D
Presentation Transcript
The L-E (Torque) Dynamical Model: Gravitational Forces Inertial Forces Coriolis & Centrifugal Forces Frictional Forces
Lets Apply the Technique -- Lets do it for a 2-Link “Manipulator” Link 1 has a Mass of m1; Link 2 a mass of m2
We Start with Ai’s Not Exactly D-H Legal (unless there is more to the robot than these 2 links!)
So Lets find T02 • T02 = A1*A2
I’ll Compute Similar Terms back – to – back rather than by the Algorithm
Finding Di • Considers each link a thin cylindrical bar • These are Inertial Tensors with respect to a Fc aligned with the link Framesi at the Cm
Finishing J1 Note the 2nd column is all zeros – even though Joint 2 is revolute – this is the special case!
Developing the D(q) Contributions • D(q)I = (Ai)TmiAi + (Bi)TDiBi • Ai is the “Upper half” of the Ji matrix • Bi is the “Lower Half” of the Ji matrix • Di is the Inertial Tensor of Linki defined in the Base space
Building D1 • D(q)1 = (A1)Tm1A1 + (B1)TD1B1 • Here:
Looking at the 2nd Term (Angular Velocity term) • Recall that D1 is: • Then:
Putting the 2 terms together, D(q)1 is: 2x2 because it is a 2-jointed robot!!
Building the Full Manipulator D(q) • D(q)2 = D(q)1 +(A2)Tm2A2 + (B2)TD2B2 • Recalling (from J2):
Building the ‘2nd’ Term (the Linear Vel. part from the second link):
Building the 3rd Term: • Recall D2: • Then:
Combining the 3 Terms to construct the Full D(q) Manipulator Inertial Tensor “Solution”: 2x2 because it is 2 Joints (still)!
Simplifying then, the Manipulator inertial Tensor D(q) is: NOTE: D(q)man is Square in number of Joints! 2x2 here because this is a 2-jointed robot!!
This Completes the Fundamental Steps: • Now we compute the Velocity Coupling Matrix and Gravitation terms:
Plugging ‘n Chugging (1st link) • From Earlier:
Finding h1: • Given: gravity vector points in –Y0 direction • gk =(0, -g0, 0)T • g0 is gravitational constant • In the h model Akij is extracted from the relevant Jacobian matrix • Here: 3-directions of Cartesian base space! Here, i=1
Continuing (i =1): From Jacobianj Upper half – specified components Gravitational effect: Would be 3 terms (BUT) only K = 2 survives since gravitational vector points in –Y0 direction
Computing h2 Would be 3 terms (BUT) only K = 2 survives as gravitational vector points in –Y0 direction
Building “Torque” Models for each Link • In General:
For Link 1 (i=1): • The 1st terms: • 2nd Terms:
Initial Link 2 terms: • !st Terms: • 2nd Terms: