Download
1 / 1
10 likes | 141 Vues
Tactile Interface for the Visually-Impaired and Blind. Assistive Devices Track – P11017. Team Members (Left to Right) Tim Giguere Mechanical Engineer - Team Leader Tim DeBellis Electrical Engineer - Interface Engineer Christian Seemayer Electrical Engineer

E N D
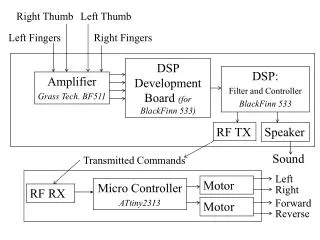
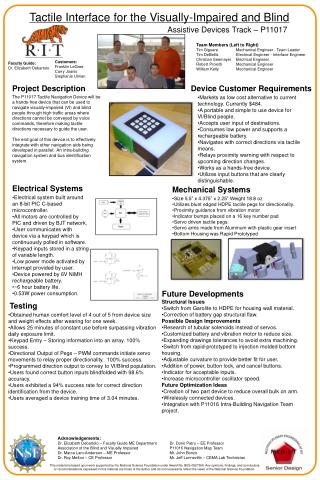
Tactile Interface for the Visually-Impaired and Blind Assistive Devices Track – P11017 Team Members (Left to Right) Tim Giguere Mechanical Engineer - Team Leader Tim DeBellis Electrical Engineer - Interface Engineer Christian Seemayer Electrical Engineer Robert Proietti Mechanical Engineer William Kelly Mechanical Engineer Customers: Franklin LeGree Carry Joanis Stephanie Ulman Faculty Guide: Dr. Elizabeth Debartolo Project Description Device Customer Requirements The P11017 Tactile Navigation Device will be a hands-free device that can be used to navigate visually-impaired (VI) and blind people through high traffic areas where directions cannot be conveyed by voice commands, therefore making tactile directions necessary to guide the user. The end goal of this device is to effectively integrate with other navigation aids being developed in parallel: An intra-building navigation system and bus identification system. • Markets as low cost alternative to current technology. Currently $484. • A portable and simple to use device for VI/Blind people. • Accepts user input of destinations. • Consumes low power and supports a rechargeable battery. • Navigates with correct directions via tactile means. • Relays proximity warning with respect to upcoming direction changes. • Works as a hands-free device. • Utilizes input buttons that are clearly distinguishable. Electrical Systems Mechanical Systems • Electrical system built around an 8-bit PIC C-based microcontroller. • All motors are controlled by PIC and driven by BJT network. • User communicates with device via a keypad which is continuously polled in software. • Keypad inputs stored in a string of variable length. • Low power mode activated by interrupt provided by user. • Device powered by 6V NiMH rechargeable battery. • ~6 hour battery life. • 0.53W power consumption. • Size 5.5” x 4.375” x 2.25” Weight 18.8 oz • Utilizes blunt edged HDPE tactile pegs for directionality. • Proximity guidance from vibration motor • Indicator bumps placed on a 16 key number pad • Servo driven tactile pegs. • Servo arms made from Aluminum with plastic gear insert • Bottom Housing was Rapid Prototyped Future Developments • Structural Issues • Switch from Garolite to HDPE for housing wall material. • Correction of battery gap structural flaw. • Possible Design Improvements • Research of tubular solenoids instead of servos. • Customized battery and vibration motor to reduce size. • Expanding drawings tolerances to avoid extra machining. • Switch from rapid-prototyped to injection moldedbottom housing. • Adjustable curvature to provide better fit for user. • Addition of power, button lock, and cancel buttons. • Indicator for acceptable inputs. • Increase microcontroller oscillator speed. • Future Optimization Ideas • Creation of two part device to reduce overall bulk on arm. • Wirelessly connected devices. • Integration with P11016 Intra-Building Navigation Team project. Testing • Obtained human comfort level of 4 out of 5 from device size and weight effects after wearing for one week. • Allows 25 minutes of constant use before surpassing vibration daily exposure limit. • Keypad Entry – Storing information into an array. 100% success. • Directional Output of Pegs – PWM commands initiate servo movements to relay proper directionality. 100% success. • Programmed direction output to convey to VI/Blind population. • Users found correct button inputs blindfolded with 98.6% accuracy. • Users exhibited a 94% success rate for correct direction identification from the device. • Users averaged a device training time of 3.04 minutes. Acknowledgements: Dr. Elizabeth Debartolo – Faculty Guide ME Department Dr. DorinPatru – EE Professor Association of the Blind and Visually Impaired P11016 Navigation Map Team Dr. Marca Lam-Anderson – ME Professor Mr. John Bonzo Dr. Roy Melton – CE Professor Mr. Jeff Lonneville – CEMA Lab Technician This material is based upon work supported by the National Science Foundation under Award No. BES-0527358. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author and do not necessarily reflect the views of the National Science Foundation.