Vectors
Vectors. Sections 6.6. Objectives. Rewrite a vector in rectangular coordinates (in terms of i and j ) given the initial and terminal points of the vector. Determine the magnitude and direction of a vector given in terms if i and j .


Vectors
E N D
Presentation Transcript
Vectors Sections 6.6
Objectives • Rewrite a vector in rectangular coordinates (in terms of i and j) given the initial and terminal points of the vector. • Determine the magnitude and direction of a vector given in terms if i and j. • Add and subtract vectors given in terms of i and j. • Multiply a vector given in terms of i and j by a real number (scalar multiplication). • Find a unit vector for a vector given in terms of i and j. • Write a vector in terms of i and j the magnitude and direction of the vector.
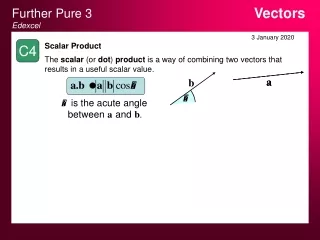
Vocabulary a straight line segment whose length is magnitude and whose orientation in space is direction • vector • scalars • scalar multiplication • unit vectors • magnitude this is another name for a normal number multiplying a vector by a number a vector whose magnitude is 1 that has the same direction as the original vector length of the vector (symbol: )
Formulas • Rectangular Coordinate • Magnitude a vector v with initial point and terminal point can be represented in rectangular coordinates as a vector v with initial point and terminal point has a magnitude of
Write the vector v with initial point P1 = (2, —9) and terminal point P2 = (5, —6) in rectangular coordinates. To write a vector in rectangular coordinates, we need the following basic set up: The coordinate x1 and y1 come from the initial point and x2 and y2 come from the terminal point. When we plug these into the equation we get: continued on next slide
Write the vector v with initial point P1 = (2, —9) and terminal point P2 = (5, —6) in rectangular coordinates. Although we are not asked, it is important to know in which quadrant our vector vlies. All vectors in rectangular coordinates are in standard position with their initial point at the origin (0, 0). The terminal point of the vector is the point (a, b) where v = a i + bj. Our vector is This vector has terminal point (3, 3). Since this point is in quadrant I, our vector lies in quadrant I.
Write the vector v with initial point P1 = (3, 6) and terminal point P2 = (3, —1) in rectangular coordinates. To write a vector in rectangular coordinates, we need the following basic set up: The coordinate x1 and y1 come from the initial point and x2 and y2 come from the terminal point. When we plug these into the equation we get: continued on next slide
Write the vector v with initial point P1 = (3, 6) and terminal point P2 = (3, —1) in rectangular coordinates. Although we are not asked, it is important to know in which quadrant our vector vlies. All vectors in rectangular coordinates are in standard position with their initial point at the origin (0, 0). The terminal point of the vector is the point (a, b) where v = a i + bj. Our vector is This vector has terminal point (0, -7). Since this point is on the y-axis below the x-axis, our vector is point straight downward along the y-axis and thus is not in any quadrant.
Write a Vector in Terms of Its Magnitude and Direction a vector v with magnitude ||v|| and direction θcan be written A vector in rectangular coordinates can be thought of a the terminal side of an angle in standard position. The measure of the angle θ on the interval [0, 2π) whose terminal side is the vector v is the direction of the vector v.
Find the magnitude and direction of the vector u = 8i — j. Recall that magnitude was defined as: a vector v with initial point and terminal point has a magnitude of In this problem, we have no initial point or terminal point given. Instead our vector is in rectangular coordinates and thus has initial point (0, 0) and terminal point (a, b) where in our case a is 8 and b is -1. When we plug this initial and terminal point into the magnitude formula, we get You should notice that the numbers in the parentheses to be squared correspond exactly to the a and b in our vector (form v = ai + b j). continued on next slide
Find the magnitude and direction of the vector u = 8i — j. This will give us an alternate formula for magnitude when the vector is already in rectangular coordinates (form v = ai + b j). alternate magnitude formula. Now back to our problem. If we continue to simplify the magnitude calculation, we get Now that we have the magnitude, we can use the formula that defines a vector in terms of its magnitude and direction to find the direction. continued on next slide
Find the magnitude and direction of the vector u = 8i — j. a vector v with magnitude ||v|| and direction θcan be written We know that the magnitude of our vector is We also know that a is 8 and b is -1. Thus we have the following two equations. We can use either one to solve for θ. We will get the same answer. The cosine equation turns out to be the easier equation to work with when it comes to finding the direction of a vector. If you want to see how to find the direction by solving the sine equation, go to slide 30 of this slide show. continued on next slide
Find the magnitude and direction of the vector u = 8i — j. We are going to use what we know about solving trigonometric equations to solve the equation below. We may be tempted to say that the direction is the angle found above. But we run into one problem with this. The inverse cosine function has a range of [0, π]. This means that vector would have to lie in quadrants I or II for the angle θ to be the direction of the vector. This means that we have to check the quadrant in which our vector lies to find the direction. continued on next slide
Find the magnitude and direction of the vector u = 8i — j. Our vector has a terminal point at (8, -1). This point is in quadrant IV. Thus the angle θ that we found is not the direction. Since θ is in quadrant I, the reference angle for θis θ itself. We need to find the angle in quadrant IV that has the same reference angle. The formula for finding a reference angle in quadrant IV is: We now plug in the reference angle to the formula and solve for the angle. The angle that we get will be the direction of the vector. Thus the magnitude is: and the direction is:
The process that we just went through in our problem to find the direction of a vector that is in quadrant IV will also need to be done for vectors in quadrant III. When we solve the cosine equation for θ, we will get an angle in quadrant II. We will need to reference angle for θ. In quadrant II, the reference angle is found using In our case that will be: reference angle = π—θ Our next step will be to find the angle in quadrant III that has that same reference angle. The formula for finding a reference angle in quadrant III is: We now plug in the reference angle to the formula and solve for the angle. The angle that we get will be the direction of the vector. Notice that this is the same as when we had a vector in quadrant IV. Thus if our vector is in quadrants III or IV, the direction can always be found as
Find the magnitude and direction of the vector v = 1i + 2j. We can use the alternate formula for magnitude when the vector is already in rectangular coordinates (form v = ai + b j). alternate magnitude formula. Plugging in for a and b we get Now that we have the magnitude, we can use the formula that defines a vector in terms of its magnitude and direction to find the direction. continued on next slide
Find the magnitude and direction of the vector v = 1i + 2j. a vector v with magnitude ||v|| and direction θcan be written We know that the magnitude of our vector is We also know that a is 1 and b is 2. Thus we have the following two equations. We can use either one to solve for θ. We will get the same answer. Once again we will use the cosine equation just to be consistent. continued on next slide
Find the magnitude and direction of the vector v = 1i + 2j. We are going to use what we know about solving trigonometric equations to solve the equation below. Since the inverse cosine function has a range of [0, π]. Thus the angle θ is in quadrant I. Our vector has a terminal point of (1, 2). This point is also in quadrant I. Thus the direction of the vector is
Given the vectors u = —3i — 7j and v = 10i — 8j, find • ||u|| This is asking us to find the magnitude of the vector u. We can use the alternate magnitude formula for this alternate magnitude formula. continued on next slide
Given the vectors u = —3i — 7j and v = 10i — 8j, find • u + v This is asking us to add the vectors v and u. We add vectors by adding like terms continued on next slide
Given the vectors u = —3i — 7j and v = 10i — 8j, find • u — v This is asking us to subtract the vector v from the vector u. We subtract vectors by combining like terms continued on next slide
Given the vectors u = —3i — 7j and v = 10i — 8j, find • 4v This is asking us to multiply the vector v by the scalar 4. This is done just as we do distribution of multiplication over addition continued on next slide
Given the vectors u = —3i — 7j and v = 10i — 8j, find • 10u + 7v This is asking us to first do the scalar multiplication and then add the results
Definition and Formulas • Unit Vector the unit vector of v is a vector of magnitude 1 that has the same direction as the vector v
Find the unit vector of the vector v = — 1i — 2j. The formula for find the unit vector is This requires that we first find the magnitude of the vector and then multiply the vector by the scalar that is 1 divided by the magnitude. We can find the magnitude using the alternate magnitude formula. alternate magnitude formula. continued on next slide
Find the unit vector of the vector v = — 1i — 2j. Now we divide the vector by or multiply the vector by This will give us
Write the vector v in terms of the i and j components if ||v|| = 3 and θ = 60 °. a vector v with magnitude ||v|| and direction θcan be written
Write the vector v in terms of the i and j components if ||v|| = 5 and θ = 225 °. a vector v with magnitude ||v|| and direction θcan be written
Write the vector v in terms of the i and j components if ||v|| = 5 and θ = 180 °. a vector v with magnitude ||v|| and direction θcan be written
Find the magnitude and direction of the vector u = 8i — j. From the example starting on slide 10, we got the following two equations that we could solve. We can use either one to solve for θ. In the example starting on slide 10, we solved the cosine function. Here we will go through the process of solving the sine function. The angle θ found by solving this equation must be in the interval [-π/2, π/2] since this is the range of the inverse sine function. Since the argument of the arcsine function is negative here, the angle θmust be in the interval [-π/2, 0). Such an angle cannot be a direction of a vector (remember direction must be in the interval [0, 2π)). continued on next slide
Find the magnitude and direction of the vector u = 8i — j. We need to take the angle that we have and move it to the interval [0, 2π). One thing that we can do to find an angle in the interval [0, 2π), it to find an angle coterminal to θ that is in the interval [0, 2π). We do this by adding 2π to the angle we have. This process will always work for a vector in quadrant IV when you use the sine equations to solve for the direction. continued on next slide
This process will not work for a vector which falls in any other quadrant. If the vector is in quadrant I, solving the sine equation for the direction will give you the answer without further work. For all other quadrants, we need to remember that two angles which have the same sine value will have the same reference angle. If our vector fall in quadrant II, we know that the sine of the direction will be positive. To find out what the direction is, we would first solve the sine equation. This will give us the reference angle. We then plug the reference angle into the equation for finding the reference angle in quadrant II. If we solve this equation for the angle, we will have the direction of a vector in quadrant II. This basic equation will always produce the direction angle of a vector in quadrant II. continued on next slide
Once again we must remember that two angles which have the same sine value will have the same reference angle. If our vector fall in quadrant III, we know that the sine of the direction will be negative. To find out what the direction is, we would first solve the sine equation. This will give us angle, θ, in the interval [-π/2, 0] (the part of the range for the inverse sine function comes from negative inputs). To find the reference angle for this angle, we first need for it to be in the interval [0, 2π). To do we need to add 2π to the angle θ. Once there we need to use the formula for finding the reference angle in quadrant IV. Now we need to put this reference angles into quadrant III by plugging it into the equation for finding a reference angle in quadrant III and solving for the angle that is the direction of the vector. This basic equation will always produce the direction angle of a vector in quadrant III. continued on next slide
Having gone through all this for finding the direction of the vector by solving the sine equation that is produced, you can see that this is more complicated than using the cosine equation. Each quadrant produces a different process for finding the direction of a vector: quadrant I: θ quadrant II: π – reference angle quadrant III: π – θ quadrant IV: θ + 2π