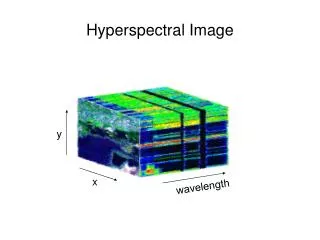
Bottom Characterization from Hyperspectral Image Data
Bottom Characterization from Hyperspectral Image Data. Philpot et al. 2004. Why use remote sensing for mapping bottom characterizations?. Corresponds to a significant portion of the euphotic zone in coastal areas Useful in habitat, shipping, and recreational applications

Bottom Characterization from Hyperspectral Image Data
E N D
Presentation Transcript
Bottom Characterization from Hyperspectral Image Data Philpot et al. 2004
Why use remote sensing for mapping bottom characterizations? • Corresponds to a significant portion of the euphotic zone in coastal areas • Useful in habitat, shipping, and recreational applications • Can map extend and distribution of bottom types • Monitor changes in habitat over time • Passive remote sensing is better than active acoustic sensing most of the time
PHILLS • Portable Hyperspectral Imager for Low-Light Spectroscopy • Designed specifically for coastal oceans • Atmospheric correction is done using TAFKAA, the only atmospheric correction algorithm specifically designed for hyperstpectral
PHILLS image off of Barneget Bay, NJ, 2001. Different bottom types show up in the image on the left. R_rs spectra for selected points are shown on the right
Interpreting the signal • Both the water and (and what’s in the water) and the bottom transforms and reflect incident solar radiation • The bottom reflects light based on roughness and material type • Not easy to separate water-column and bottom effects • However bottom biota and sediments reflect more light and have different spectral shapes compared to no bottom
Hydrolight simulated R_rs for three different bottom types (sand, grass, black) at 0.1 m (top) and 10 m (bottom) • Spectra remain unique for different bottom types • Black is supposed to represent “deep sea”?
Complicating factors • Effective range of useful light changes with water depths b/c water strongly absorbent in the red • 400 – 720 nm for very shallow waters • 400 – 600 nm for deeper waters (> 2m) • Bottom reflectance is directional, i.e. dependent on angle of incoming light and angle of observation but generally assumed Lambertian
Forward problem IOP’s Rrs Inversion Problem Inversion Methods • Solving for bottom type and depth • Analytical Methods • Optimization Approaches • Look-up Tables • Neural Networks
Analytical Methods • Overly simplified • Limiting assumptions • Data-set specific • Minimum number of wavelengths • To solve for depth assume homogeneous water column, uniform bottom type
Optimization Approach • System of linear equations • One equation per wavelength, with unknown parameters in each equation • But each equation contains spectrally dependent parameters that need to be solved for (i.e. the system is undetermined) so need more equations • Increasing number of wavebands (hyperspectral) will not help (only adds more equations and unknowns) • But hyperspectral can resolve the derivatives of the spectrum and this can be used to add more equations w/o adding unknowns, i.e. overdetermines the system • Can now use traditional optimization techniques to solve the system, buts it time consuming and not clear which method is best
Look-up Tables (LUT) • Use a radiative transfer model (e.g. Hydrolight) to create a data base of Rrs(λ) for various water depths, bottom type, and water column IOP’s for given sky and sea conditions at variuos viewing angles • Measured Rrs(λ) compared with database to find a match using a least squares minimization • This match then gives both water column and bottom properties with no a priori knowledge of the area • Creating the database is time consuming but only needs to be done once
Temporal Variability • Must distinguish temporal variability caused by water-column processes vs. bottom processes • Generally bottom processes are longer scale than water-column processes and can be considered static on time scales of a week • Spatial scales more important for bottom processes
Spatial Resolution and Variability • 10m PHILLS image vs 1 km SeaWiFS image of backscatter at 555 nm • Increased spatial resolution of PHILLS required in coastal waters • SeaWiFS lack the spectral resolution to characterize bottom types
Halpern et al., Science 2006 • Used SeaWiFS to estimate ocean primary production • Concluded the ecosystem was dominated by top-down control Kelp Forest monitoring sites KFMP (open circles right along the coast. Mean SeaWiFS chl-a