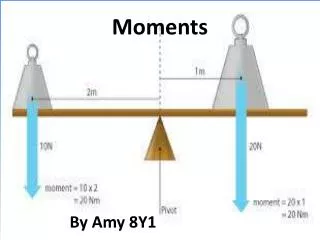
Moments
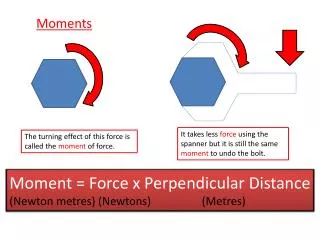
Moments. describe the image content (or distribution) with respect to its axes. area of the object. center of mass. Centralized Moments. Moments are not invariant geometric transformations To achieve invariance under translation. Hu Moments.

Moments
E N D
Presentation Transcript
Moments • describe the image content (or distribution) with respect to its axes area of the object center of mass
Centralized Moments • Moments are not invariant geometric transformations • To achieve invariance under translation
Hu Moments • Hu described a set of 6 moments that are rotation, scaling, translation invariant
Hu Moments(contd.) • In addition he described a 7th invariant that is skew invariant • Other invariants are • Legendre Moments • Complex Zernike Moments
Image Reconstruction • Unless we have all Nmax moments, the image cannot be reconstructed. • The top order moments are good approximations of the images 0-8 2-12
Hough Transform • Procedure to find occurrences of a shape”in an image • Assumes the “shape” can be described in some parametric form • Points in image correspond to a family of parametric solutions • A voting scheme is used to determine the correct parameters
Accumulator Space • A line in the cartesian space is a point in the hough space • Create an accumulator whose axis are the parameters • Set all values to zero • We “discretize” the parameter space • Parameter are quantized to fit into the finite p-space • For each edge point, votes for appropriate parameters in the accumulator • Increment this value in the accumulator
Line Detection • all possible lines going through P Parametric form y = mx + c
Circle Detection • Consider a 2D circle • It can be parameterized as: • r 2= (x-a) 2 + (y-b)2 • Assume an image point was part of a circle, it could belong to a unique family of circles with varying parameters: • a, b, r