Download
1 / 15
150 likes | 284 Vues
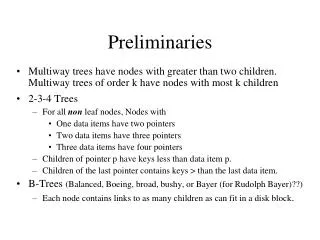
This document delves into the fundamentals of 3D mathematical transformations, including translation, scaling, rotation, and shear. It explains the concepts of left-handed and right-handed coordinate systems, and provides detailed equations for transformations in homogeneous coordinates. The content covers positive rotations about various axes and introduces the idea of mapping 4D points into 3D space. It emphasizes the nature of rigid body transformations, highlighting how they preserve shapes, angles, and lengths, and describes the properties of affine transformations with practical applications.

E N D
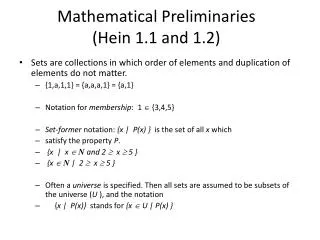
Y Y Z X X Z Coordinate Systems Left-handed Right-handed coordinate coordinate system system
•Translation •Scale •Rotation Basic Transformations
TP = (x + tx, y + ty, z + tz) Translation in Homogeneous Coordinates T P
SP = (sxx, syy, szz) Scale Note: A scale may also translate an object!
Positive Rotations are defined as follows Axis of rotation is Direction of positive rotation is y to z z to x x to y Rotations
About the z axis Rz(ß) P = About the x axis Rx(ß) P = About the y axis Ry(ß) P = Rotations
xy Shear SHxyP = Shears Y Y X X Z Z
If Tr is any transformation, then it is possible that the 4th component of the point will not be 1. TrP = Tr(x,y,z,1) = (x', y', z',w) Pplotted = (x'/w, y'/w, z'/w) Transformations may be appended together via matrix multiplication. Mapping a 4D point into R3
a = (u12 + u32) b = (u12 + u22) c = (u22 + u32) cosß = u3/a sinß = u1/a Rotation About An Arbitrary Axis P2 1. Translate one end of the axis to the origin [P2-P1] = [ u1, u2, u3] Z U P1 c u3 Y a ß u2 b u1 X
2. Rotate the coordinate axes about the y-axis an angle -ß Z Z a c u3 a Y ß µ Y u2 u2 b u1 X X After Ry(-ß), µ lies in the y-z plane
4. When u is aligned with the z-axis, apply the original rotation, R, about the z-axis. 5. Apply the inverses of the transformations in reverse order. 3. Rotate the coordinate axes about the x-axis through an angle µ to align the z-axis with U U Z Rx(µ) cos µ = a/ ||u|| sinµ = u2 / ||u|| µ Y X
T-1 Ry(ß)Rx(-µ)RRx(µ)Ry(-ß)T P Rotation About an Arbitrary Axis
A transformation maps points in one coordinate system to points in another coordinate system. Rigid body transformations Do not distort shapes – line lengths and angles are preserved Rotations, Translations, and combinations of both Transformation Types
Affine transformations Keep parallel lines and planes parallel. Parallelograms map into oter parallelograms. but do not necessarily preserve line lengths or angles Preserve collinearity and “flatness” so the image of a plane or line is another plane or line. Rotations, Translations, Scales, Shears, and combinations of these Affine Transformation Properties