Northrop Grumman - Remotec
Northrop Grumman - Remotec. Charreau Bell Chris Campis Ben Dowell Mike Duffy Drew Schnabel Tom Waddell. Introduction. Remotec is a subsidiary of Northrop Grumman Founded in 1980 to provide remote handling consultation to the nuclear industry

Northrop Grumman - Remotec
E N D
Presentation Transcript
Northrop Grumman - Remotec Charreau Bell Chris Campis Ben Dowell Mike Duffy Drew Schnabel Tom Waddell
Introduction • Remotec is a subsidiary of Northrop Grumman • Founded in 1980 to provide remote handling consultation to the nuclear industry • Experience gained by supporting the nuclear industry, identified the opportunity to expand and apply core competencies to meet robotic requirements outside of the nuclear field • Industry leader in hazardous duty robotics by continually improving technology to meet the ever-changing challenges • Recognized for the outstanding support to fielded systems with 24 hour on-call technical support and the ability to rapidly provide spares support to customers around the world
Stakeholders • Northrop Grumman - Remotec • Point of Contact: Bill Whiteley • This tool will be very valuable in the neutralization of Vehicle Borne Improvised Explosive Devices (VBIED) • Additional Stakeholders • Military: Navy/Army/Air Force • Law Enforcement Agencies
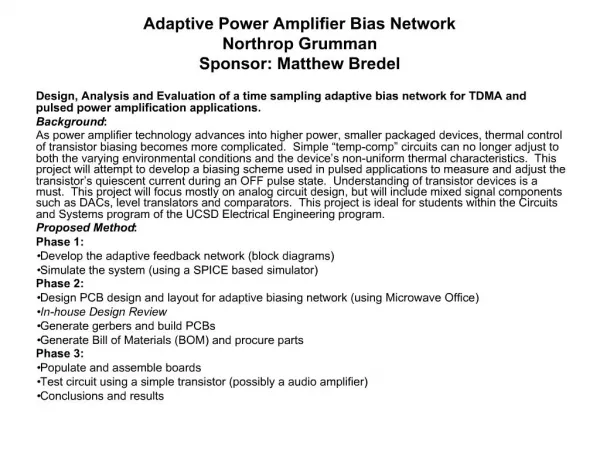
Situation • Robots are employed to evaluate suspicious packages or vehicle: open doors, break windows, open trunk, jaws of life • Neutralization of bomb: high pressure water cannon, drop charges, or tear package apart • Access to car may restricted due to obstacles: move car to safer area to investigate the car
Design Proposal:Large Vehicle Movement Tool • Northrop Grumman currently has three robots in the 400 - 900 lbs range • User community desires the capability to use these robots to move a common automobile a short distance, such as across a parking lot, but not up or down a hill or across uneven terrain • Robots have plenty of power (have towed a school bus before) but no way to lift one end of a parked vehicle • Tool must be able to be attached in someway to the robot and must be capable of lifting a must common car (~4000 lbs) enough to tow it to a new location • Tool provides all of the lifting power and must be controlled in someway from the command console
Robot Platform: F6A Features • Full camera suite system • Multiple-mission tool/sensor mounts with plug-and-play capabilities • Gripper with continuous rotate • Manipulator arm's seven degrees of freedom ensure optimum dexterity • Quick-release pneumatic wheels for rapid width-reduction, no tools required • Patented articulating tracks for traversing ditches, obstacles and the roughest terrain • Increased height to meet mission requirements • Dual accessory mounts on arm allow simultaneous, multiple weapon/sensor deployment Communication • Fiber-optic cable – deployed from the vehicle • Radio control (wireless) • Hard-tether cable
Specific Requirements • Goal: Design of tool • Pending approval: prototype followed by production • Cost: $12,000 - 15,000 tool • Target: build for $6,000 - 7,000 including materials and assembly • High probability of moving the car • Not every vehicle will be moveable • Communication: must provide serial communication protocol and interface for operation of tool
Procedures – Progress Reports • Frequency: Bi-Weekly • Medium: E-mail • Template: PowerPoint • Received from POC
Actions • Began preliminary design • Receive CAD model of robot from POC • Began development of project requirement definition • Rough draft completed and sent in 2 weeks • Develop project schedule • Rough draft completed and sent in 2 weeks • Schedule visit to facilities for on-site research • To be determined (mid-late November)