Download
1 / 13
130 likes | 331 Vues
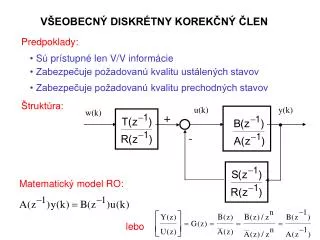
VŠEOBECNÝ DISKRÉTNY KOREKČNÝ ČLEN. Predpoklady:. Sú prístupné len V/V informácie. Zabezpečuje požadovanú kvalitu ustálených stavov. Zabezpečuje požadovanú kvalitu prechodných stavov. Štruktúra:. Matematický model RO:. lebo. Štruktúra riadenia. Diferenčná rovnica:.

E N D
VŠEOBECNÝ DISKRÉTNY KOREKČNÝ ČLEN Predpoklady: • Sú prístupné len V/V informácie • Zabezpečuje požadovanú kvalitu ustálených stavov • Zabezpečuje požadovanú kvalitu prechodných stavov Štruktúra: Matematický model RO: lebo
Štruktúra riadenia Diferenčná rovnica: Rovnica uzavretého obvodu: alebo
Vzťah medzi vstupom a výstupom: Nech je želaný charakteristický polynóm: Polynómy korekčného člena musia vyhovovať rovnici: Voľba stupňov polynómov korekčného člena:
nb -1 Riešenie diofantickej rovnice: na
Ukážeme riešenie pre systém druhého rádu: na = 2, nb = 2 nr = 1, ns =1 Roznásobíme: Porovnaním koeficientov pri rovnakých mocninách z dostávame:
Dynamika uzavretého obvodu je opísaná vzťahom: Treba ešte navrhnúť polynóm T Ak w je konštantná alebo stupňová funkcia: vtedy
z čoho vyplýva: Zákon riadenia má tvar: Problémy: • krátenie polynómu B • presný model
Riešenie: 1. Výber periódy vzorkovania T = Ts/5 = .2s 2. Výpočet diskrétnej prenosovej funkcie 3. Štruktúra riadenia: R(z-1) = 1 + r1z-1 S(z-1) = s0 + s1z-1
3. Voľba želaného polynómu: 4. Riešenie diofantickej rovnice: r! = 0.3159 s0 = 17.8 s1= 14.865
Im Re Návrh želaného polynómu metódou „pole-shift“ Rozmiestnenie pólov sa odvodí od pólov A:
Nech g = 0.5 r1 = .3447 s0 = 28.4275 s1 = =16.22 t0 = 14.88 Nech g = 0.1 r1 = .6205 s0 = 51.1699 s1 = -29.1975 t0 = 25.199