Download

1 / 57
570 likes | 697 Vues
This paper presents a Medium Access Control (MAC) protocol specifically designed for vehicle-to-vehicle (V2V) safety messages. It introduces a Quality of Service (QoS) model that addresses the transmission of critical safety information in real-time. The protocol is based on rebroadcasting messages multiple times while they remain valid and explores six design variations through mathematical analysis and simulation. This work aims to optimize the reliability and efficiency of vehicle safety systems, enhancing safety on the roads by enabling real-time data sharing among vehicles.

E N D
Medium Access Control Protocol Design for Vehicle-Vehicle Safety Messages Presented by: Amal Alhosban October 28 2009
The Authors • Qing Xu • Tony Mak • Jeff Ko • Raja Sengupta University of California, Berkely
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Abstract • Proposed Medium Access Control (MAC) Protocol designed for vehicle • Safety messages V-V • Developed a QoS model for safety messages • Each message has : • Range • Lifetime
Abstract • The protocol design based on rebroadcasting each message multiple times within its lifetime • Proposed Six different design variation • Derived equations, developed simulation tool to assess the performance of the design
Performance depend on: • Number of rebroadcast • Power • Modulation • Coding • Traffic
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Introduction Main purpose for this paper: Design wireless networks to enable vehicle safety systems The engineershave been designing vehicle system to • protect crash sec or less before • warn the driver • control the vehicle Active safety system
Active safety systems • Provide forward collision warning • Awareness about vehicles in blind spot • Conflicts at intersections But they share common needs: • The locations • Motions of its neighboring V We know the state using sensors Radar, laser Collision thread come from different directions radar looking forward, rear, right and left lane. The state of the V
CASS (authors 04) Cooperative Active Safety System Enabling active safety system by learning the state of neighbors V using GPS and Wi-Fi Why GPS & Wi-Fi?
Safety • Academic response: VANET vehicular ad hoc networks • Government & industry • FCC federal communication commission safety messages will have priority access • IEEE create IEEE 802.11p, built priority for safety And others…
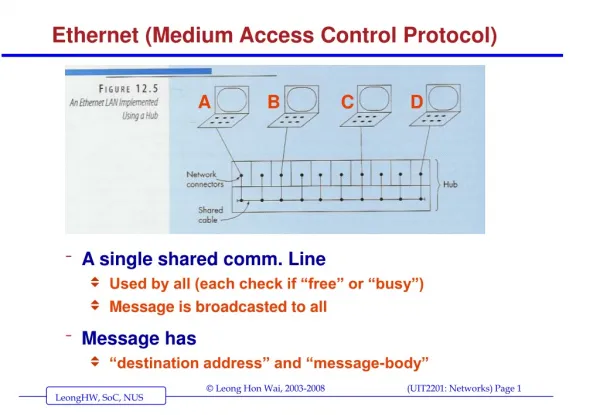
A Snapshot of Vehicle Neighborhood Map • 3 cars • Periodically transmit its GPS position, speed and heading (motion state) • Each car receive information and plot • Arrow in the middle the car • Arrowhead for direction
Network design The evaluation: • Driving on 4-8 lane freeway • 802.11a radio • 20 MHz channel To evaluate design we need to estimate : • The amount of data traffic • Pick QoS measures
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Problem formulation • Bound the amount of data that could be generated by CASS • Describe the QoS model
Problem formulation • Bound the amount of data that could be generated by CASS • Describe the QoS model
When we Expect safety message? • Position • Speed • Heading • Turn signal • Break lights
The load depend on: • Safety message rate • Message size • Traffic density • Distance Because its wireless
CASS message rate • Safety message rate (1 – 10 Hz) • The vehicle transmits its motion state every 50 msec and the receiving vehicle can track smoothly • Moves 2 meter in 50 msec • When broadcast 1/500 too slow, driver reaction time every 500 msec • If the information delayed 500 msec the driver will see the threat before the system • In the system between 1/50 -1/500
CASS • Producing messages are independent • But may not true (example brakes)
CASS paket size • SAE J1746 encode vehicle location using 2 bytes • NTCIP using 5 bytes • CASS 100 – 400 • 80 network protocol header • 100 header and data compression • 170 location and motion
CASS broadcast • When V broadcast safety message its inform oncoming V about state of motion, the V far away should be told when it closer • How we determine near and far? • By having critical range (CR) for the message the V should receive the message before reach this range (stopped car in free way) • CR Depend on the content of message and its range
Problem formulation • Bound the amount of data that could be generated by CASS • Describe the QoS model
Describe the QoS model • CASS will not be fully designed and the levels of data traffic generated will not be known • Two QoS measures suitable when using CASS • (PRF) the probability of reception or reception failure (loss) • Channel busy time
PRF The probability a randomly chosen receiver at message range fails to receive a message within lifetime Lifetime = inverse of the rate (to reduce the number of dimensions 5 in the table)
Channel busy time (CBT) If two protocols deliver messages with same PRF but CBT of one lower than the other, we consider one with lower CBT T safety : total length of time period within T T : time period
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
In this paper • They didn’t use TDMA, FDMA or CDMA because difficult to allocate slot, codes and channels without centralized control • The design based on ALOHA and CSMA • MACA, MACAW, FAMA all uses (RTS/CTS) cannot use them for broadcast • Replaced in one ref by (RTB/CTB)
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Mac extension design • To maximize the probability (min PRF) • Care when repeat message (collision) • 6 variation on the reapeatetion • synchronous and asynchronous design • repetition with and without carrier sensing • fixed number and p-persistent repetition
The proposed protocol • Designed between logical link layer and MAC layer • Its role is to generate and remove repetitions • Implemented using NS2
Proposed protocol • Asynchronous Fixed Repetition (AFR) the number of repetitions k • Asynchronous p-persistent Repetition (APR) the number of repetitions k/n for n slots • Synchronous Fixed Repetition (SFR) • Synchronous p-persistent Repetition (SPR) • Asynchronous p-persistent Repetition with Carrier Sensing (APR-CS) • Asynchronous Fixed Repetition with Carrier Sensing (AFR-CS)
MAC Layer State Machine of the AFR-CS protocol Check channel status if busy If corrupted Pass to physical layer Check integrity
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Content • Abstract • Introduction • Problem formulation • Literature review and related technologies • Mac extension design • Mathematical analysis • Simulation development • Optimizing design • Conclusion • References
Performance of AFR-CS Protocol as a Function of Interferer Number
PRF of SFR Protocol at Various Data Rates in the Nominal Setting: Analytical