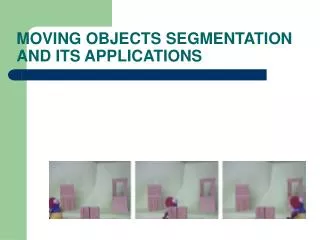
Moving Objects Segmentation: Algorithm Development and Applications in Video Processing
This document discusses a proposed algorithm for moving object segmentation, focusing on smoothing processes, moving algorithms, template matching schemes, and background estimation. The methodology employs spatial-temporal approaches to identify moving versus static pixels, utilizing median filtering for Y channel smoothing and applying refinement algorithms for enhanced accuracy. Core concepts include minimum squared error solutions and Gaussian distribution for pixel state probabilities, facilitating improved detection of multiple objects in video frames through effective template searches and post-processing techniques.

Moving Objects Segmentation: Algorithm Development and Applications in Video Processing
E N D
Presentation Transcript
Proposed Algorithm 1.smoothing process 2.moving algorithm 3.template matching scheme 4.background estimation 5.post-processing
Smoothing Processing 取出 Y, C b, C r
Smoothing Processing Median filtering to smooth Y Result the processed Y’
Moving Object Segmentation Adopt a spatial-temporal approach to segment object X-y-t to x-t image
3D-2D Y = 179 Row data of x-t means a pixel 180*320 320*240*180
Refinement algorithm M1(x,t), M2(x,t) and M3(x,t) correspond to red, green and blue channels moving (f(x,t)=1) or static (f(x,t)=0)
Refinement algorithm L pixels (L frame length) in a row data
Minimun squared error The problem of Eq.(5) is solved by using the pseudoinverse operation, which is based on minimum squared-error (MSE) method [8]. The solution W is formulated as,
Pseudoinverse M† is called the pseudoinverse of matrix M defined as,
Moving or static pixel 原: 改: Moving piexl static piexl
Threshold calculate the means μ and variances σ22 of state values State value pixel
Gaussian distribution of two states State value Static pixel Moving pixel Probability,p(x|s)
Discriminate function g(x) Threshold = 0.39m Weighting value: [ω1 , ω2 , ω3 ] =[0.0002,-0.0326,0.0315]
X-Y marked graph Original x-y marked image
Multiple object detection Start frame End frame
Search template Color different
Search template u,v 搜尋範圍
Search template-min Then refine the marked values b(x,y) of current frame,
Background estimation Based on x-t sliced image If moving pixel a(x,t)=1 If static pixel a(x,t)=0
Post-processing By template =>