Download
1 / 2
20 likes | 229 Vues
Innovation A force feedback hand controller device was developed which performs three main functions: A six degree-of-freedom (DOF) controller (position and orientation of the hand) for controlling devices – mainly an advanced joystick or flight-yoke for the whole hand.

E N D
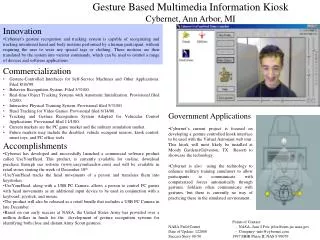
Innovation • A force feedback hand controller device was developed which performs three main functions: • A six degree-of-freedom (DOF) controller (position and orientation of the hand) for controlling devices – mainly an advanced joystick or flight-yoke for the whole hand. • A force reflecting hand controller to reflect input forces to a person’s hand and arm. • A dexterous master to reflect forces to a person’s five fingers. Force Feedback Hand ControllerCybernet, Ann Arbor, MI Accomplishments • As part of the contract, Cybernet developed prototypes of the hand-controller, a flight-yoke, the control hardware, and control software. The prototypes were called “CyberImpact devices.” A virtual reality engine runs a world simulation system, which calls for a force to be generated from its internal world model. Significant technical achievements to date : • The CyberImapct 6-DOF hand controller is a commercially mature backdrivable robot controller which moves in six degrees of freedom. It consists of six successively distal stages, the proximal three of which are prismatic and the distal three are revolute. The prismatic stages combine to form a Cartesian XYZ platform, thus providing end effector spatial locations. The distal stages combine, in a mutually orthogonal yaw/pitch/roll arrangement, to provide end effector spatial orientation. Each distal stage has an angular travel of ±45°. Each stage is driven by a brushless DC servomotor, through rack/pinion (prismatic) and gear/pinion (revolute) drivetrains. The device thus serves as a true haptic input/position output device. Incremental optical encoders mounted on the motor backshafts provide position information to the driving computer, while torque serving the motors provides force reflection to the operator. • Cybernet’s Dexterous Master (DM) consist of four identical finger assemblies and one thumb assembly that is composed of a standard finger assembly and an additional actuated DOF. All mechanical components were constrained to exist along the dorsal surface of the hand, in order to minimize the probability of finger/mechanism collision. The orientation of each intermediate master finger joint is not transduced, but is left to the discretion of the slave computer. Five identical servo-controlled actuator units use a small electric brushless motor to drive a synchronous belt drivetrain of ratio 3:7:1. The auxiliary motor for the thumb is the same model, but operates through a bevel gear drivetrain. • Johnson Space Center • Date of update: 03/06/00; SS 9-025 Points of Contact: - NASA Jane Fox, jifox@ems.jsc.nasa.gov - Company mailto:info@cybernet.com 1988 SBIR Phase II; NAS 9-18351
Commercialization Based on the work of these two contracts, Cybernet developed a number of DOF and 3 DOF products which were sold in small units to various companies, including Lawrence Livermore National Lab, Ford, McDonnell Douglas, Wright Patterson Air Force Base, University of Delaware, Case Western Reserve, BMW, FAA, INCO Limited, DISAM Escuela, High Techsplanation, Sandia National Labs, S.A. Sodetek, University of Nevada, and Battelle. The total sales in force feedback devices exceeded $500,000. In May 1999, Cybernet received a net $5 Million inflow of capital from Immersion Corporation as part of the merger of Cybernet’s Force Feedback intellectual property and business with Immersion's. Based on the current NASDAQ value of Immersion stock, this inflow is now valued at approximately $40 million. Government/Science Applications • Cybernet has entered into a strategic alliance with Immersion Corporation. • The firms target market was mainly the gaming sector and flight simulators. • However, instead of pursuing that market and competing with Immersion • Corporation, we instead decided to join forced with them. • Patents: • Feb 16, 1999: 5,872,438 Whole-body kinesthetic display. • Dec 1, 1998: 5,844,392 Haptic Browsing. • Nov. 3, 1998: 5,831,408 Force feedback system • May 19, 1998: 5,754,023 Gyro-stabilized platforms for force-feedback • applications • May 13, 1997: 5,629,594 Force feedback system • Oct 17, 1995: 5,459,382 Method and system for providing a tactile • virtual reality and manipulator defining an interface device therefor. • Feb 14, 1995: 5,389,865 Method and system for providing a tactile • virtual reality and manipulator defining an interface device therefor.