Download
1 / 67
670 likes | 819 Vues
Global Positioning System (GPS) Joe Montana IT 488 - Fall 2003 pp.0-17. preklad: R. Vislai, Vokulič r.2010, Ko š ice. Pseudonáhodné kódy. Mame dva druhy pseudonáhodných kódov .

E N D
Global Positioning System (GPS) Joe Montana IT 488 - Fall 2003 pp.0-17 preklad: R. Vislai,Vokulič r.2010, Košice
Pseudonáhodné kódy Mame dva druhy pseudonáhodných kódov . • Prvý pNk sa nazýva C/A (Hrubé získavanie)kód. Ten ovláda L1 nosič. Opakuje každých 1023 bitov a moduluje na 1mhz stupnici. Každá družica ma svoj jedinečný pNK. C/A kód je základom pre civilne používanie GPS. C/A kód je 1.024 MBPS • Druhy pNK sa nazýva P (presný)kód. Ten opakuje sedem dňový cyklus a moduluje obidva nosiče L1 aL2 na 10MHz skale. Tento kód sa používa na vojenské účely a môže byt zašifrovaný. Keď je zašifrovaný nazýva sa Y kód. P kód je viac komplikovaný ako C/A kód pre prijímanie prijímačom. • Preto veľa vojenských prijímačov začne dostávať C/A kód až potom sa presunie na P kód. P kód je 10.24Mbps .
Zhrnutie - Meranie vzdialeností • Vzdialenosť družice je určená meraním ako ďaleko je rádiový signál ktorý dosiahne užívateľa z družice. • Pre odmeranie ktoré predpokladáme že obidva kódy družice a užívateľa sú rovnako tvoriace pNK v úplné rovnakom čase. • Porovnávaním ako neskoro družicový pNK dosiahne v porovnaním z kódom prijímača určuje ako dlho ho dosiahne. • Vynásobte cestovnú dobu z rýchlosťou svetla a dostanete vzdialenosť.
Zhrnutie - Meranie vzdialeností • Vzdialenosť družice je určená na základe meraní ako dlho trvá rádiovému signálu kým dosiahne užívateľa tohto satelitu. • Pre tieto merania predpokladáme, že družicový a užívateľský prijímač generuje rovnaký pseudokód v presne rovnaký čas. • Tým že porovnávame čas potrebný o ktorý sa omeškáva družicový pseudokód oproti kódu v prijímači, tak prijímač určuje ako dlho trvá signálu • Vynásobte čas rýchlosťou svetla a máte vzdialenosť. Ale na meranie času treba perfektnú synchronizáciu!!!
3 - Časovanie • Časovanie je kritické 1ms znamená 200 míľovú chybu. • Pamätajte že družica a prijímač potrebujú mať presne zosynchronizované ich pNK aby fungovali. • Na strane družice je časovanie perfektne pretože ma neuveriteľné presne atómové hodiny na palube. • Ale čo s prijímačmi na zemi?
Časovanie prijímačov • Ak by náš prijímač potreboval atómové hodiny (ktoré predstavujú 50 000 dolárov - 100 000 dolárov)GPS by nebolo ekonomické. • Vyriešiť tento problém je že musíme urobiť extra meranie. • Toto je jeden z kľúčových prvkov GPS a ako pridaná postranná odmena ktorá znamená že každý GPS prijímač ma v podstate vlastne atómové hodiny. • Inými slovami: Ak 3 perfektne merania môžu lokalizovať bod v 3 rozmernom priestore potom štvrté nedokonale meranie môže urobiť rovnakú vec.
Ako funguje časovanie prijímača • Ak je časovanie perfektné (ak sú hodiny prijímača perfektné), tak dosah satelitov sa pretína v 1 jedinom bode (ktorý je zhodný s pozíciou prijímača). Ale s nepresnými hodinami, štvrté meranie sa nebude pretínať s prvými troma. • Takže počítač prijímača dokáže rozpoznať rozdiel v meraní času a rozpoznáva rozdiel v synchronizácií s univerzálnym časom. • Keďže nepomer univerzálneho času ovplyvní všetky merania prijímača, tak ten teda hľadá jeden korekčný faktor, ktorý môže odpočítať od všetkých svojich meraní, ktorý spôsobí že všetky sa pretnú v jednom bode. • Táto korekcia synchronizuje čas prijímača s univerzálnym časom s presnosťou atómových hodín.
Ako funguje časovanie prijímača • Ako náhle má prijímač časovú korekciu, okamžite ju aplikuje na ostatné svoje merania a tým zaručuje presne lokalizovanie. • Jedným z dôsledkov tohto princípu je, že každý prijímač GPS musí mať najmenej 4 kanály, takže je schopný spúšťať 4 merania súčasne . • Ale pre triangulačné práca nepotrebujeme poznať iba vzdialenosť, potrebujeme poznať aj kde presne sa družica nachádza. • V ďalšej časti sa dozvieme ako to zistiť
Zhrnutie - Časovanie • Presné časovanie je kľúčom k meraniu vzdialenosti k družici • Družice sú presné pretože obsahujú atómové hodiny • Hodiny prijímača nemusia byť tiež takto presne pretože extra satelitný rozsah merania môže odstrániť chyby • Ale pre triangulačné práca nepotrebujeme poznať iba vzdialenosť, potrebujeme poznať aj kde presne sa družica nachádza. • Ďalšia časť
4 – Pozícia družice vo vesmíre • Na zemi ma každý prijímač „almanac“ naprogramovaný do ich počítačov, ktorý im povie kde na nebi sa družica nachádza v každom momente.
Monitorovanie pozície družice • Orbity sú sústavne monitorované DoD -Ministerstvom obrany • DoD používa veľmi precízny radar ktorý kontroluje presnú nadmorskú výšku, polohu a rýchlosť. • Chyby v polohe sú spôsobenej gravitačnom pôsobením Mesiaca a Slnka a slnečným žiarením, ktoré pôsobí na satelity. • Chyby sú zvyčajne veľmi malé, kvôli vysokej obežnej dráhe (MEO), ale pre presnosť musia byť zohľadnené.
Monitorovanie pozície družice • Ako náhle DoD má zameranú presnú pozíciu satelitu, relé odosiela túto informáciu spať satelitu. Satelit potom zohľadní túto novú opravenú informáciu o polohe v časovaných signáloch ktoré vysiela. • To je dôvod, prečo signál GPS je viac než len pseudonáhodný kód pre časovanie. Obsahuje tiež navigačnú správu s astronomickými informáciami.
Zhrnutie - Pozícia satelitu • Na použitie satelitov ako referencie pre rozsah merania, potrebujeme vedieť kde presne sa nachádzajú. • GPS satelity na vyšších obežných dráhach (MEO- Medium Earth Orbit), sú veľmi predvídateľné. • Drobné rozdiely v ich obežných dráhach sú korigované ministerstvom obrany (DOD). • Informácie o chybe sú zasielané na satelity spolu s načasovaním signálov.
5 – Ďalšie chyby • Predpokladanú vzdialenosť satelitu môžeme jednoducho vypočítať vynásobením doby za ktorý sa dostane signál zo satelitu na Zem a rýchlosťou svetla vo vákuu. (rýchlosť svetla je konštantná len vo vákuu.) • Signál GPS prechádzajúci cez nabité častice ionosféry a potom cez vodnej pary v troposfére, je vďaka týmto vplyvom spomalený , a preto vytvára rovnaký typ chyby ako zlé hodiny.
Oprava chyby z omeškania • Na minimalizovanie chýb z omeškania, môžme predpovedať aké bude omeškanie v typický deň. Tento spôsob sa nazýva modelovanie a poskytuje značné zlepšenie ale s obmedzením, pretože atmosférické podmienky sú málokedy priaznivé (typické). • Ďalšia možnosť ako eliminovať chybu z omeškania je porovnanie relatívnych rýchlostí dvoch rôznych signálov. Toto "Dvojitá frekvencia" meranie je veľmi sofistikované a je možné len s pokročilými prijímačmi: • Fyzika vraví, že ak svetlo prechádza cez dané médium, nízkofrekvenčné signály sú rozptýlené alebo spomalené viac ako vysokofrekvenčné signály. Porovnaním dvoch rozličných nosičov frekvencií z GPS signálu, L1 a L2, môžme predpokladať aké to médium (napr. atmosféra) je, a môžeme túto chybu eliminovať. • Bohužiaľ je potrebné veľmi sofistikovaný prijímač, odkedy iba armáda ma prístup k nosiču signálu L2.
Ďalšie zdroje chýb • Chyba kvôli prekážkam: Signál sa môže odraziť od rôznych miestnych prekážok predtým ako dosiahne prijímač. • Nedostatky atómových hodín (malé ale nenulové) • Chyba zisťovania pozície • Geometrické oslabenie presnosti • Medzinárodné chyby (odstránené v r.2000) ministerstva obrany (DoD). Tieto chyby boli volané "Selective Availabity" alebo "SA" a myšlienkou bolo zaviesť nepresnosť, aby sa ubezpečili že žiadna nepriateľská sila alebo teroristická skupina nemohli použiť GPS k tvorbe navádzaných zbraní.
Geometrické oslabenie presnosti- GDOP • Základná geometria sama môže zväčšiť tieto iné chyby pomocou princípu "Geometric Dilution of Precision" alebo GDOP (Geometrické oslabenie presnosti) • Znie to zložito ale princíp je úplne jednoduchý • Zvyčajne je tu oveľa viac dostupných satelitov než môže prijímač použiť na zistenie polohy, takže prijímač si vyberie pár a ignoruje zvyšok. • Ak si vyberie satelity ktoré sú blízko pri sebe, tak krížiace sa kruhy ktoré definujú pozíciu budú skrížené pod veľmi malým uhlom. To zvýši šedú zónu alebo chybové rozpätie okolo pozície. • Výber satelitov, ktoré sú široko oddelené, pretínajúce sa v pravom uhle spôsobí že sa minimalizujú chyby v regióne. • Dobrý prijímač dokáže rozoznať ktorý zo satelitov dá najnižšie GDOP
Zhrnutie - Oprava chýb • 1. Zemská ionosféra a atmosfére spôsobujú omeškanie v GPS signáli čo sa potom premieta do chyby v určovaní pozícii. • 2. Niektoré chyby môžu byť opravené pomocou matematiky a modelovania. • 3. Nesprávna konfigurácia družíc (satelitov) môže zväčšiť nepresnosti alebo iné chyby. • 4. Diferenčné GPS môžu eliminovať takmer všetky chyby.
GPS typy. • "Diferenčné GPS" (Differential GPS) zahŕňa použitie dvoch prijímačov. Jeden monitoruje zmeny signálu a predáva tieto zmeny ďalšiemu prijímaču. Druhý prijímač môže vďaka tomu opraviť svoje výpočty pre lepšie zameranie. • " Carrier-phase GPS " využíva signál GPS, nosný signál, k zvýšeniu presnosti. Nosná frekvencia signálu je oveľa vyššia ako signál GPS, čo znamená že môže byť použité pre presnejšie meranie času • " Augmented GPS " (rozšírené GPS z leteckého priemyslu) zahŕňa použitie geostacionárnej družice ako relé stanicu pre prenos diferenciálnych korekcií a informácii o stave družice GPS. Tieto úpravy sú nevyhnutné, ak je GPS používane v nástrojoch ktoré sú určené pre pristávanie. Geostacionárne družice zabezpečujú opravy chýb na celom kontinente.
Diferenčné GPS • Chyba v lokalizácií je skreslenie plus náhodné chyby • Skreslenie je v celej oblasti - spôsobené omeškaním v atmosfére, ephemeris ( astronomická tabuľa) chyba, a tak ďalej. • Pevne zafixovaný prijímač na známej pozícií môže zmerať chybu skreslenia. • Rádiokomunikačná linka umožňuje používateľovi merať chybu skreslenia. • Extra prijímač a dátová linka výrazne zvyšuje náklady. • Používalo sa v civilných aplikáciách pred odstránením SA - Selective Availabity (2000).
GPS presnosť • C/A (Civilné GPS): • Približne 10 metrov. • P (Armádne GPS) : • Je možné zamerať na centimeter presne s využitím techniky diferenciálnej GPS.
GPS Aplikácie: • Civilne Pozície - základná pozícia • Tracking( stopovanie) - Monitorovanie ľudí a veci. Timing ( časovanie) - s presnosťou atómových hodín • Vojenské: priemerné zameriavanie a navigácia pre US-AF • Surveying (prežitie) - Mapovanie a lokácie súše • Automobilová navigácia - navigačné systémy v automobiloch • Lodna navigácia - Typické pri pobrežiach a vo vnútro zemných vodách • Navigácia lietadiel a pristaní - s vývojom AGPS, FAA
GPS limitácie • Prijímač musí mat čistý priestor k 4 a viac satelitom • Nedá sa pracovať v budovách alebo keď je blokovaná obloha. • Presnosť vo vertikálnej dimenzii je menšia ako v horizontálnej • C/A kód môže byt neodolný voči interferenciám a rušeniam
Ostatne možnosti navigačných systémov • Landmarks (Pozemne značky): Fungujú len na určenom mieste. Môžu byt prenesene alebo zničené environmentálnymi faktormi • Dead Reconing: Veľmi komplikovaný. Presnosť záleží na výpočtoch. Často dochádza k chybám • Celestial: Komplikovane. Funguje len v noci za dobrého počasia, limitovaná presnosť • OMEGA: Založená na rádiových základniach. Limitovaná presnosť a subjekt musí prijímať rádiové vlny • LORAN: Limitovane pokrytie(najčastejšie pobrežie). Variabilná presnosť, vzhľadom na geografickú situáciu. Náchylné k skokom a prerušeniam • SatNav: Založená na nízkofrekvenčnom dopplerovom meraní. Je citlivé na malé pohyby prijímača. Malo satelitov takže update je frekventovanejší
Zdrojové materiály: http://www.trimble.com/gps Leila Z. Ribeiro Class Handouts
Vybudovanie systému GPS • Americké ministerstvo obrany rozhodlože vojsko potrebuje veľmi precízny polohovací systém. • A našťastie mali 12 miliárd dolárov na jeho vybudovanie.
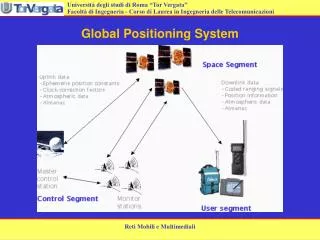
Čo je systém GPS • Celosvetový rádionavigačný systém je tvorený 24 satelitmi a ich pozemnými stanicami. • Používa satelity ako referenčné bodyna vypočítanie pozície s presnosťou na metre (vyspelé formy GPS vedia dosiahnuť centimetrovú presnosť). • GPS prijímačesa zminiaturizovali sú lacné a bežne dostupné koncovým používateľom. • Používajú sa v autách, člnoch, lietadlách, stavebných a poľnohospodárskych strojoch,pri vytváraní filmov, a tak ďalej.
GPS Satelity • Meno: NAVSTAR Výrobca: Rockwell International • Nadmorská výška: 10.900 námorných míľ • Hmotnosť:1900 kg (na obežnej dráhe) • Veľkosť :17 ft s otvorenými solárnymi panelmi • Obežná doba: 12 hodín • Orbitálnarovina: 55 stupňov na rovníkovej rovine • Plánovaná životnosť: 7,5 roka • constellation: 24 Block II production satellites • Future satellites: 21 Block IIrs developed by Martin Marietta.
Pozemné riadiace stanice • Tiež známy ako „Riadiaci Segment". • Monitoruje GPS satelity, kontroluje aj ich prevádzkovýstav a ich presnú polohu v priestore. • Pozemná riadiaca stanica vysiela naspäť pre satelity korekcie a ofsety hodín. • Satelity potom môžu zahrnúť tieto aktualizácie do signálu ktorý pošlú do GPS prijímača. • Existuje päť riadiacich staníc: Hawaii, Ascension Island, Diego Garcia, Kwajalein, and Colorado Springs.
Ako pracuje systém GPS • Základom GPS je "triangulácia" zo satelitov (formálne"trilaterácia"). • Na "trianguláciu"prijímač GPS zmeria vzdialenosť pomocou času za ktorý rádiový signál sa dostane zo satelitu do príjimača • Pre meranie tohto času GPS potrebuje veľmi presné časovanie, ktoré dosahuje pomocou niektorých špecifických techník. • Spolu so vzdialenosťou, prijímač potrebuje presne vedieť, kde sú satelity vo vesmíre. Vysoká obežná dráha a monitorovanie prispejú k presnosti. • Nakoniec prijímač musí vedieť opraviť akékoľvek oneskorenie signálu pretože signál cestuje cez atmosféru.
1 – Triangulácia zo satelitov • Využíva satelity vo vesmíre ako referenčné body pre vypočítanie umiestnenia na Zemi • Ako pomôže znalosť vzdialeností z troch alebo viac satelitov určeniu presnej polohy?
Triangulácia - Základy • Pozícia je vypočítaná z merania vzdialeností (rozsahu) od satelitov. • Matematicky potrebujeme štyri satelity na určenie presnej polohy. • Tri rozsahy sú dostatočné, ak odmietame absurdné odpovede alebo použijeme inú pomoc. • Ďalší rozsah je nutný z technických dôvodov ktoré budú uvedené neskôr.
Vzdialenosť od jedného satelitu • Predpokladajme, že meriame našu vzdialenosť od satelitu a zistíme, že je vzdialený 11.000 míľ (to že ako to zistíme je predmetom ďalšej diskusie) • Keďvieme že sme 11.000 míľ od určitého satelitu, zužuje našu možnú polohu v celom vesmíre na plochu jednej guľe, ktorej stredom je práve tento satelit a a má polomer 11.000 míľ. 11,000 míľ Nachádzame sa niekde na tejto ploche.
Vzdialenosť od dvochsatelitov • Ďalej predpokladajme že meriame našu vzdialenosť od druhého satelitu, a zistíme že sme 12.000 míľ ďaleko. • Takto zistíme, že nie sme iba na povrchujednej guľe, ale aj na druhej ktorá je 12.000 míľ od druhého satelitu. Alebo inými slovami, sme niekde na okruhu, kde tieto dve guľe sa pretínajú. 12,000 miles sphere Guľa s polomerom 12,000 míľ Guľa s polomerom 11,000 míľ 11,000 miles sphere Podľa dvoch meraní sa nachádzame na ploche tohto kruhu
Vzdialenosť od troch dsatelitov • Keby sme zmerali našu vzdialenosť od tretieho satelitu, a zistili by sme že sme 13000 míľ ďaleko, to by ešte viacej spresnilo našu pozíciu, na dva body, kde by guľa s priemerom 13000míľ pretínala kruh ktorý je priesečníkom predošlých dvoch. Podľa troch meraní jeden z týchto dvoch bodov je naša poloha Guľa s polomerom 11000 míľ Guľa s polomerom 13000 míľ Guľa s polomerom 12000 míľ
Triangulácia - Zhrnutie • Zmeraním vzdialenosti od troch satelitov môžeme zúžiť našu pozíciu iba na dva body v priestore. • Na zistenie, že ktorý z týchto dvoch bodov je naša reálna pozícia, môžeme zrobiť štvrté meranie, ale zvyčajne jeden z týchto dvoch bodov je buď píliš ďaleko od zeme alebo má nereálnu rýchlosť, a preto ho možme vylúčiť bez merania. • Štvrté meranie môže prísť vhod z iného dôvodu, ktorývysvetlíme neskôr. • Ďalej uvidíme ako systém meria vzdialenosť od satelitov.
2 - Meranie vzdialenosťi od satelitu • Poloha sa vypočítava z merania vzdialenosti od najmenej troch satelitov. Ale ako merať vzdialenosť? • Riešenie: Podľa času, ako dlho trvá pre signál vyslaný z družice, aby sa dostal k prijímaču. • Rýchlosť svetla: c = 300.000 km / sec • Vzdialenosť satelitu je d = c x Td Problémom je meranie času.
Meranie času • Pseudo náhodný kód je prenášaný z každého satelitu. • Fyzicky to je pseudo-náhodná sekvencie "on" a "off" impulzov. • Prijímač pozná čas prenosu tejto sekvencie. • Pomocou synchronizácie prijatej sekvencie s lokálne generovanou sekvenciou, prijímač môže identifikovať relatívne oneskorenie medzi satelitom a jeho umiestnením. Prenos z družice Príjem na GPS prijímači Td Čas, ktorý uplynul medzi satelitom a prijímačom
Dôvody pre použitie pseudo náhodných sekvencií • Aby nedošlo k interferencii s inými rušivými signálmy. Vzory tejto sekvencie sú natoľko zložité že je veľmi nepravdepodobné aby došlo rušivý signál by mal rovnaký tvar. • Nakoľko každý satelit má svoj vlastný jedinečný pseudo-náhodný kód, tak to umožňuje identifikáciu daného satelitu. Takže vlastne všetky satelity môžu používať rovnakú frekvenciu. • Pseudo-náhodné sekvencie tiež sťažia rušenie signálu nepriateľskými silami. V skutočnosti pseudonáhodný kód umožňuje kontrolu nad systémom. • A čo je najdôležitejšie, spread-spectrum efekt umožňuje prijímaču "zosilniť" signál. Toto umožňuje vyrábať lacné GPS prijímače (prenosné jednotky s nízkym ziskom antény).
GPS Signály • GPS satelity vysielajú signály na dvoch nosných frekvenciách. • Frekvencia L1 je 1575,42 MHz a nesie aj správu o stave a pseudo-náhodný kód pre časovanie. • L2 frekvencia je 1227,60 MHz a používa sa pre presnejší vojenský pseudo-náhodný kód. • Navigačnáspráva: nízkofrekvenčný signál sa pripojí k L1 kódom a poskytuje informácie o obežnej dráhe, o čase ao stave systému.
Pseudonáhodné kódy Mame dva druhy pseudonáhodných kódov . • Prvý pNk sa nazýva C/A (Hrubé získavanie)kód. Ten ovláda L1 nosič. Opakuje každých 1023 bitov a moduluje na 1mhz stupnici. Každá družica ma svoj jedinečný pNK. C/A kód je základom pre civilne používanie GPS. C/A kód je 1.024 MBPS • Druhy pNK sa nazýva P (presný)kód. Ten opakuje sedem dňový cyklus a moduluje obidva nosiče L1 aL2 na 10MHz skale. Tento kód sa používa na vojenské účely a môže byt zašifrovaný. Keď je zašifrovaný nazýva sa Y kód. P kód je viac komplikovaný ako C/A kód pre prijímanie prijímačom. • Preto veľa vojenských prijímačov začne dostávať C/A kód až potom sa presunie na P kód. P kód je 10.24Mbps .
Zhrnutie - Meranie vzdialeností • Vzdialenosť družice je určená meraním ako ďaleko je rádiový signál ktorý dosiahne užívateľa z družice. • Pre odmeranie ktoré predpokladáme že obidva kódy družice a užívateľa sú rovnako tvoriace pNK v úplné rovnakom čase. • Porovnávaním ako neskoro družicový pNK dosiahne v porovnaním z kódom prijímača určuje ako dlho ho dosiahne. • Vynásobte cestovnú dobu z rýchlosťou svetla a dostanete vzdialenosť.
Zhrnutie - Meranie vzdialeností • Vzdialenosť družice je určená na základe meraní ako dlho trvá rádiovému signálu kým dosiahne užívateľa tohto satelitu. • Pre tieto merania predpokladáme, že družicový a užívateľský prijímač generuje rovnaký pseudokód v presne rovnaký čas. • Tým že porovnávame čas potrebný o ktorý sa omeškáva družicový pseudokód oproti kódu v prijímači, tak prijímač určuje ako dlho trvá signálu • Vynásobte čas rýchlosťou svetla a máte vzdialenosť. Ale na meranie času treba perfektnú synchronizáciu!!!
3 - Časovanie • Časovanie je kritické 1ms znamená 200 míľovú chybu. • Pamätajte že družica a prijímač potrebujú mať presne zosynchronizované ich pNK aby fungovali. • Na strane družice je časovanie perfektne pretože ma neuveriteľné presne atómové hodiny na palube. • Ale čo s prijímačmi na zemi?
Časovanie prijímačov • Ak by náš prijímač potreboval atómové hodiny (ktoré predstavujú 50 000 dolárov - 100 000 dolárov)GPS by nebolo ekonomické. • Vyriešiť tento problém je že musíme urobiť extra meranie. • Toto je jeden z kľúčových prvkov GPS a ako pridaná postranná odmena ktorá znamená že každý GPS prijímač ma v podstate vlastne atómové hodiny. • Inými slovami: Ak 3 perfektne merania môžu lokalizovať bod v 3 rozmernom priestore potom štvrté nedokonale meranie môže urobiť rovnakú vec.
Ako funguje časovanie prijímača • Ak je časovanie perfektné (ak sú hodiny prijímača perfektné), tak dosah satelitov sa pretína v 1 jedinom bode (ktorý je zhodný s pozíciou prijímača). Ale s nepresnými hodinami, štvrté meranie sa nebude pretínať s prvými troma. • Takže počítač prijímača dokáže rozpoznať rozdiel v meraní času a rozpoznáva rozdiel v synchronizácií s univerzálnym časom. • Keďže nepomer univerzálneho času ovplyvní všetky merania prijímača, tak ten teda hľadá jeden korekčný faktor, ktorý môže odpočítať od všetkých svojich meraní, ktorý spôsobí že všetky sa pretnú v jednom bode. • Táto korekcia synchronizuje čas prijímača s univerzálnym časom s presnosťou atómových hodín.
Ako funguje časovanie prijímača • Ako náhle má prijímač časovú korekciu, okamžite ju aplikuje na ostatné svoje merania a tým zaručuje presne lokalizovanie. • Jedným z dôsledkov tohto princípu je, že každý prijímač GPS musí mať najmenej 4 kanály, takže je schopný spúšťať 4 merania súčasne . • Ale pre triangulačné práca nepotrebujeme poznať iba vzdialenosť, potrebujeme poznať aj kde presne sa družica nachádza. • V ďalšej časti sa dozvieme ako to zistiť