Download
1 / 2
20 likes | 186 Vues
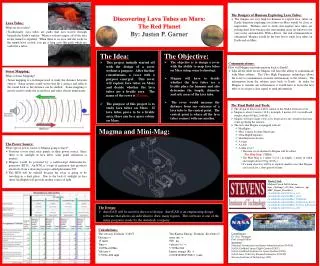
Multi-Sonar Factsheet Ver. 1.0 3 Oct 2008. Multi-Sonar Survey Controller. Overview Embedded Software Controller offering centralised ping control of multi-beam with other sonar devices operating within the same frequency range.

E N D
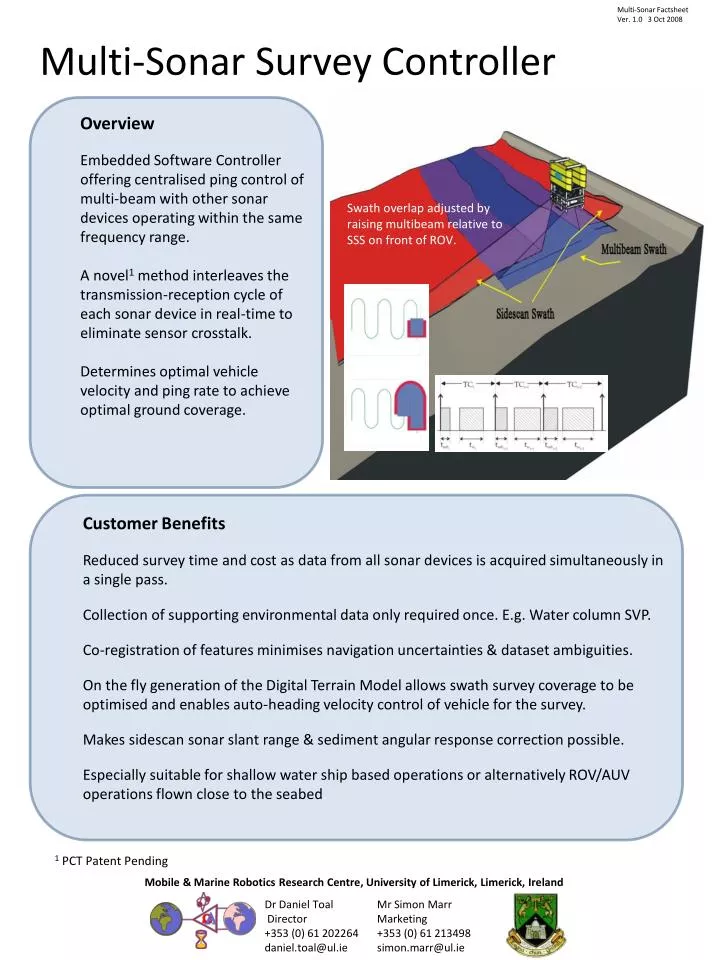
Multi-SonarFactsheetVer. 1.0 3 Oct 2008 Multi-Sonar Survey Controller • Overview • Embedded Software Controller offering centralised ping control of multi-beam with other sonar devices operating within the same frequency range. • A novel1 method interleaves the transmission-reception cycle of each sonar device in real-time to eliminate sensor crosstalk. • Determines optimal vehicle velocity and ping rate to achieve optimal ground coverage. Swath overlap adjusted by raising multibeam relative to SSS on front of ROV. • Customer Benefits • Reduced survey time and cost as data from all sonar devices is acquired simultaneously in a single pass. • Collection of supporting environmental data only required once. E.g. Water column SVP. • Co-registration of features minimises navigation uncertainties & dataset ambiguities. • On the fly generation of the Digital Terrain Model allows swath survey coverage to be optimised and enables auto-heading velocity control of vehicle for the survey. • Makes sidescan sonar slant range & sediment angular response correction possible. • Especially suitable for shallow water ship based operations or alternatively ROV/AUV operations flown close to the seabed. 1 PCT Patent Pending Mobile & Marine Robotics Research Centre, University of Limerick, Limerick, Ireland Dr Daniel Toal Director +353 (0) 61 202264daniel.toal@ul.ie Mr Simon Marr Marketing +353 (0) 61 213498simon.marr@ul.ie
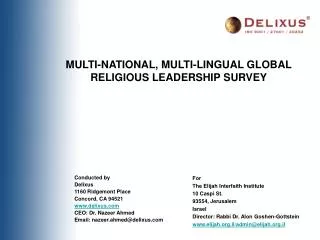
Typical Setup • MBES: Multibeam Echo Sounder data & control • SSS: Sidescan Sonar data and control • INS: Inertial Navigation System providing positioning and orientation data • Display: Swath coverage / MBES & SSS data display, system status • Surveyor Control: Desired resolution/survey specification • Pilot Control: Navigation changes to optimise coverage and performance. • Software Execution Model • Prioritised multi-threaded architecture used to achieve real-time performance. • Beam data fused with position and orientation data to generate new geo-referenced bathymetry data points . • Sonar trigger intervals and platform state recalculated from Digital Terrain Model. • Proving the Concept • Prototype implemented in C++. OpenMesh used for building the Digital Terrain Model using polygonal meshes. Separate adaptors are written for each connected device. • First release to undergo laboratory testing with the Reson 7125 Multibeam and the TritechSidescanSonars. Sea trials to follow as part of the ROVLATISpayload in Spring 2009. • Mission Support Toolkit also includes: • MPPT Ring • PULSE-RT • Learn more about the Multi-Sonar or our other Mission Support Tools by joining our new ROVLATIS mailing list or follow progress at www.rovlatis.ie Mobile & Marine Robotics Research Centre, University of Limerick, Limerick, Ireland Dr Daniel Toal Director +353 (0) 61 202264daniel.toal@ul.ie Mr Simon Marr Marketing +353 (0) 61 213498simon.marr@ul.ie