Download
1 / 1
10 likes | 161 Vues
High Speed Visual Servoing with Ultrasonic Motors. Andrea Ranftl, and Jos Vander Sloten Dept. Mech. Eng., Katholieke Universiteit Leuven, Belgium Loïc Cuvillon, and Jacques Gangloff LSIIT, Universite I Strasbourg, France.

E N D
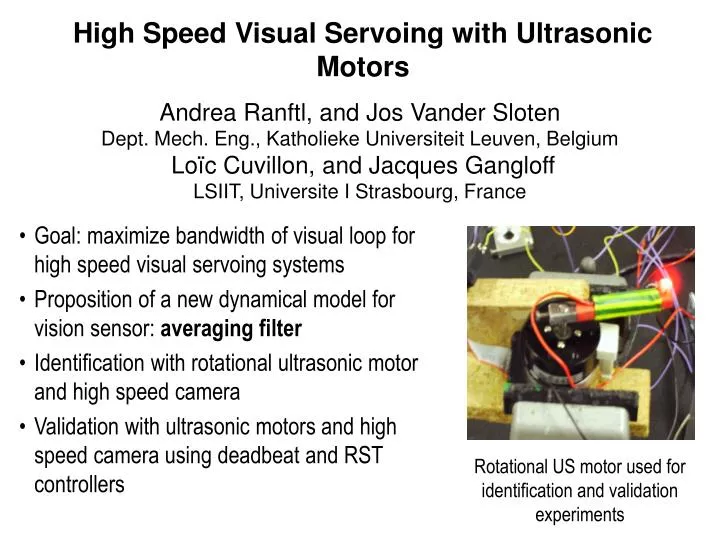
High Speed Visual Servoing with Ultrasonic Motors Andrea Ranftl, and Jos Vander SlotenDept. Mech. Eng., Katholieke Universiteit Leuven, Belgium Loïc Cuvillon, and Jacques GangloffLSIIT, Universite I Strasbourg, France • Goal: maximize bandwidth of visual loop for high speed visual servoing systems • Proposition of a new dynamical model for vision sensor: averaging filter • Identification with rotational ultrasonic motor and high speed camera • Validation with ultrasonic motors and high speed camera using deadbeat and RST controllers Rotational US motor used for identification and validation experiments