Download
1 / 1
10 likes | 202 Vues
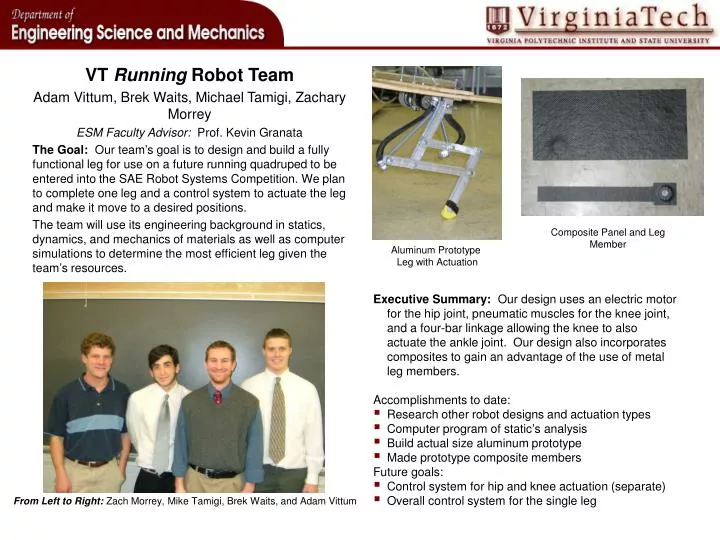
VT Running Robot Team Adam Vittum, Brek Waits, Michael Tamigi, Zachary Morrey ESM Faculty Advisor: Prof. Kevin Granata

E N D
VT Running Robot Team Adam Vittum, Brek Waits, Michael Tamigi, Zachary Morrey ESM Faculty Advisor: Prof. Kevin Granata The Goal: Our team’s goal is to design and build a fully functional leg for use on a future running quadruped to be entered into the SAE Robot Systems Competition. We plan to complete one leg and a control system to actuate the leg and make it move to a desired positions. The team will use its engineering background in statics, dynamics, and mechanics of materials as well as computer simulations to determine the most efficient leg given the team’s resources. Executive Summary: Our design uses an electric motor for the hip joint, pneumatic muscles for the knee joint, and a four-bar linkage allowing the knee to also actuate the ankle joint. Our design also incorporates composites to gain an advantage of the use of metal leg members. Accomplishments to date: • Research other robot designs and actuation types • Computer program of static’s analysis • Build actual size aluminum prototype • Made prototype composite members Future goals: • Control system for hip and knee actuation (separate) • Overall control system for the single leg Composite Panel and Leg Member Aluminum Prototype Leg with Actuation From Left to Right: Zach Morrey, Mike Tamigi, Brek Waits, and Adam Vittum