Download
1 / 13
130 likes | 372 Vues
Novel approach to nonlinear/non-Gaussian Bayesian state estimation. N.J Gordon, D.J. Salmond and A.F.M. Smith. Presenter: Tri Tran 7-2005. Outline. Motivations Recursive Bayesian estimations Bayesian Bootstrap filter algorithms Evaluations of the algorithms Summary. Motivations.

E N D
Novel approach to nonlinear/non-Gaussian Bayesian state estimation N.J Gordon, D.J. Salmond and A.F.M. Smith Presenter: Tri Tran 7-2005
Outline • Motivations • Recursive Bayesian estimations • Bayesian Bootstrap filter algorithms • Evaluations of the algorithms • Summary
Motivations • In many applications of positioning, navigation and tracking, we want to estimate the position of a moving object at discrete times. • Positioning: position of an object is to be estimated when an navigation system is used to provide measurements of movement. • Navigation: besides the position also velocity, attitude and heading, accelerating and angular rates are included in the problem. • Target tracking: another object’s position is to be estimated based on measurement of relative range and angles to one’s own position.
Motivations (cont.) • The problems can be described by state space models where the state vector contains the position and derivatives of the position. • Bayesian methods is to construct a probability density function (PDF) of the state based on all the available information. • For linear/Gaussian models, the required PDF remains Gaussian at every iteration of the filter, Kalman filter can be used to propagate and update the mean and covariance of the distribution. • For nonlinear/non-Gaussian models, there is no general analytic expression for the required PDF a new way of representing and recursively generating an approximation to the state PDF. • Central idea: represent the required PDF as a set of random samples, rather than as a function over state space.
Particle Filters • Recursive methods to estimate the dynamic state (a set of random samples) of a moving object in a discrete time nonlinear model based on posterior distributions.
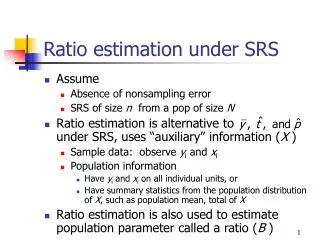
Recursive Bayesian estimation • System model xk+1 = fk(xk, wk) where fk: RnxRmRn the system transition function wk is white noise sequence of known PDF, independent of past and current states. • Measurement model (observation equation) yk = hk(xk, vk) where hk: RnxRrRp the system transition function vk is another white noise sequence of known PDF, independent of past and current states. • Assume that the initial PDF p(x1|D0) of the state vector, the functional forms fi and hi for i=1,…, k are known. • At time step k, available information is the set of measurements Dk = {yk:i=1,…,k} • Need to construct the PDF of the current state xk, given all the available information: p(xk|Dk)
Bayesian bootstrap filter • A set of random samples {xk-1(i): i=1,…,N} from the PDF p(xk-1|Dk-1). • Propagate and update the set of random samples to obtain {xk(i): i=1,…,N} which approximates as p(xk|Dk) • Prediction: each sample is passed through the system model to obtain samples from the prior at time step k: x*k(i) = fk-1(xk-1(i), wk-1(i)) • Update: with the measurement yk, evaluate a normalized weight for each sample • Thus define a discrete distribution over {x*k(i): i=1,…,N} with probability qi associated with element i • Resample N times from the discrete distribution to generate samples {xk(i): i=1,…,N}, so that for any j, Pr{xk(j)=x*k(i)} =qi
Bootstrap filter • Advantages: no restrictions on the functions fk and hk or on the distributions of the system or measurement noise. • Requirements: (a) p(x1) is available for sampling (b) the likelihood p(yk|xk) is a known functional form (c) p(wk) is available for sampling • The number of random samples N depends on: (a) the dimension of the state space (b) the typical ‘overlap’ between the prior and the likelihood (c) the required number of time steps
Evaluations of the bootstrap filter algorithm • One-dimensional nonlinear example Consider the following nonlinear model Xk= 0.5xk-1+25xk-1/(1+x2k-1)+8cos(1.2(k-1))+wk Yk=x2k/20+vk Wk and vk are zero-mean Gaussian white noise with variances 10.0 and 1.0, respectively. K=50, x0 = 0.1, N=500
Evaluations of the bootstrap filter algorithm • Bearings-only tracking example Target moves within the x-y plan: A fixed observer at the origin of the plane takes noisy measurements zk of the target bearing k=24, N=4000, initial state x1=(-0.05, 0.001, 0.7, -0.055)
Evaluations of the bootstrap filter algorithm • Bearings-only tracking example (cont.) • The actual co-ordinate value is always within the 95% probability region.
Summary • A bootstrap filter for implementing recursive Bayesian filters • The method is applied for nonlinear models and approximates the posterior distribution as a set of random samples.
References • N.J Gordon, D.J. Salmond and A.F.M. Smith, “Novel approach to nonlinear/non-Gaussian Bayesian state estimation”, in IEE Processinds-F, Vol. 140, 1993. • Fredrik Gustafsson, Fredrik Gunnarsson, Niclas Bergman, Urban Forssell, Jonas Jansson, Rickard karlsson, Per-Johan Nordlund, “Prticle Filters for Positioning, Navigation and Tracking”,IEEE Transactions on Signal Processing, vol. 50, pp. 425- 435, Feb. 2002