Download
1 / 1
10 likes | 122 Vues
270 W electrical power @ 20 ° sun elev. 35% is reflected power. Top 18% (direct). Back 7% (reflected only). Sides 19% (reflected only). Front 56% (direct + reflected). Autonomous Rovers for Polar Science Campaigns. AUG12 C13E-0683. 1. Why Develop Polar Rovers?

E N D
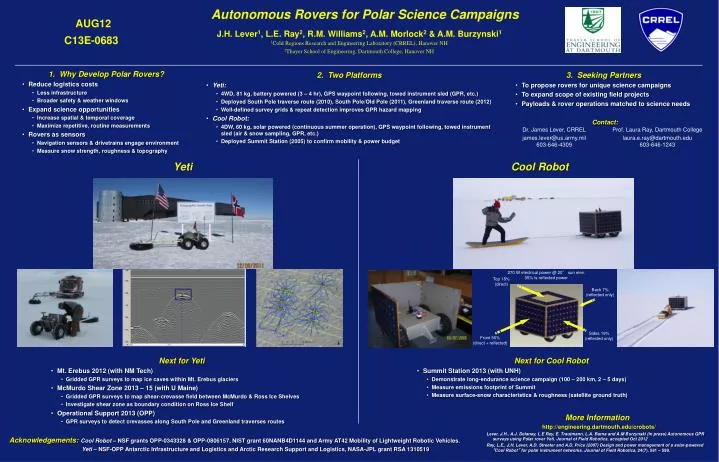
270 W electrical power @ 20° sun elev. 35% is reflected power Top 18% (direct) Back 7% (reflected only) Sides 19% (reflected only) Front 56% (direct + reflected) Autonomous Rovers for Polar Science Campaigns AUG12 C13E-0683 • 1. Why Develop Polar Rovers? • Reduce logistics costs • Less infrastructure • Broader safety & weather windows • Expand science opportunities • Increase spatial & temporal coverage • Maximize repetitive, routine measurements • Rovers as sensors • Navigation sensors & drivetrains engage environment • Measure snow strength, roughness & topography • 2. Two Platforms • Yeti: • 4WD, 81 kg, battery powered (3 – 4 hr), GPS waypoint following, towed instrument sled (GPR, etc.) • Deployed South Pole traverse route (2010), South Pole/Old Pole (2011), Greenland traverse route (2012) • Well-defined survey grids & repeat detection improves GPR hazard mapping • Cool Robot: • 4DW, 60 kg, solar powered (continuous summer operation), GPS waypoint following, towed instrument sled (air & snow sampling, GPR, etc.) • Deployed Summit Station (2005) to confirm mobility & power budget • 3. Seeking Partners • To propose rovers for unique science campaigns • To expand scope of existing field projects • Payloads & rover operations matched to science needs • Contact: Yeti Cool Robot • Next for Yeti • Mt. Erebus 2012 (with NM Tech) • Gridded GPR surveys to map ice caves within Mt. Erebus glaciers • McMurdo Shear Zone 2013 – 15 (with U Maine) • Gridded GPR surveys to map shear-crevasse field between McMurdo & Ross Ice Shelves • Investigate shear zone as boundary condition on Ross Ice Shelf • Operational Support 2013 (OPP) • GPR surveys to detect crevasses along South Pole and Greenland traverses routes • Next for Cool Robot • Summit Station 2013 (with UNH) • Demonstrate long-endurance science campaign (100 – 200 km, 2 – 5 days) • Measure emissions footprint of Summit • Measure surface-snow characteristics & roughness (satellite ground truth) • More Information • http://engineering.dartmouth.edu/crobots/ • Lever, J.H., A.J. Delaney, L.E Ray, E. Trautmann, L.A. Barna and A.M Burzynski (in press) Autonomous GPR surveys using Polar rover Yeti. Journal of Field Robotics, accepted Oct 2012 • Ray, L.E., J.H. Lever, A.D. Streeter and A.D. Price (2007) Design and power management of a solar-powered “Cool Robot” for polar instrument networks. Journal of Field Robotics,24(7), 581 – 599. Acknowledgements:Cool Robot– NSF grants OPP-0343328 & OPP-0806157, NIST grant 60NANB4D1144 and Army AT42 Mobility of Lightweight Robotic Vehicles. Yeti – NSF-OPP Antarctic Infrastructure and Logistics and Arctic Research Support and Logistics, NASA-JPL grant RSA 1310519