Download
1 / 24
240 likes | 248 Vues
Lecture 17. Goals:. Chapter 12 Define center of mass Analyze rolling motion Introduce and analyze torque U nderstand the equilibrium dynamics of an extended object in response to forces Employ “conservation of angular momentum” concept. Assignment: HW7 due tomorrow

E N D
Lecture 17 Goals: • Chapter 12 • Define center of mass • Analyze rolling motion • Introduce and analyze torque • Understand the equilibrium dynamics of an extended object in response to forces • Employ “conservation of angular momentum” concept Assignment: • HW7 due tomorrow • Wednesday, Exam Review
+ + m2 m1 m1 m2 A special point for rotationSystem of Particles: Center of Mass (CM) • A supported object will rotate about its center of mass. • Center of mass: Where the system is balanced ! • Building a mobile is an exercise in finding centers of mass. mobile
System of Particles: Center of Mass • How do we describe the “position” of a system made up of many parts ? • Define the Center of Mass (average position): • For a collection of N individual point like particles whose masses and positions we know: RCM m2 m1 r2 r1 y x (In this case, N = 2)
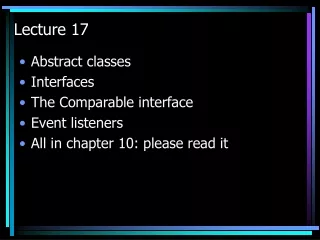
RCM = (12,6) (12,12) 2m m m (0,0) (24,0) Sample calculation: m at ( 0, 0) 2m at (12,12) m at (24, 0) • Consider the following mass distribution: XCM = (m x 0 + 2m x 12 + m x 24 )/4m meters YCM = (m x 0 + 2m x 12 + m x 0 )/4m meters XCM= 12 meters YCM= 6 meters
p p VCM p p p p p Connection with motion... • So a rigid object that has rotation and translation rotates about its center of mass! • And Newton’s Laws apply to the center of mass For a point p rotating:
Work & Kinetic Energy: • Recall the Work Kinetic-Energy Theorem: K = WNET • This applies to both rotational as well as linear motion. • What if there is rolling?
M M M M M h M who is 1st? q M Demo Example :A race rolling down an incline • Two cylinders with identical radii and total masses roll down an inclined plane. • The 1st has more of the mass concentrated at the center while the 2nd has more mass concentrated at the rim. • Which gets down first? Two cylinders with radius R and mass m Mass 1 Mass 2 They both arrive at same time
M M M M M h M v ? q M Same Example :Rolling, without slipping, Motion • A solid disk is about to roll down an inclined plane. • What is its speed at the bottom of the plane ?
Rolling without slipping motion • Again consider a cylinder rolling at a constant speed. 2VCM CM VCM
Motion • Again consider a cylinder rolling at a constant speed. Both with |VTang| = |VCM | Rotation only VTang = wR Sliding only 2VCM VCM CM CM CM VCM If acceleration acenter of mass = - aR
Disk has radius R M M M M M h M v ? q M Example :Rolling Motion • A solid cylinder is about to roll down an inclined plane. What is its speed at the bottom of the plane ? • Use Work-Energy theorem Mgh = ½ Mv2 + ½ ICMw2 and v =wR Mgh = ½ Mv2 + ½ (½ M R2)(v/R)2 = ¾ Mv2 v = 2(gh/3)½
How do we reconcile force, angular velocity and angular acceleration?
Angular motion can be described by vectors • With rotation the distribution of mass matters. Actual result depends on the distance from the axis of rotation. • Hence, only the axis of rotation remains fixed in reference to rotation. We find that angular motions may be quantified by defining a vector along the axis of rotation. • We can employ the right hand rule to find the vector direction
The Angular Velocity Vector • The magnitude of the angular velocity vector is ω. • The angular velocity vector points along the axis of rotation in the direction given by the right-hand rule as illustrated above. • As w increased the vector lengthens
From force to spin (i.e., w) ? A force applied at a distance from the rotation axis gives a torque a FTangential NET = |r| |FTang| ≡|r||F| sin q F q Fradial r r FTangential Fradial =|FTang| sin q • If a force points at the axis of rotation the wheel won’t turn • Thus, only the tangential component of the force matters • With torque the position & angle of the force matters
a FTangential F Fradial r Rotational Dynamics: What makes it spin? A force applied at a distance from the rotation axis NET = |r| |FTang| ≡|r||F| sin q • Torque is the rotational equivalent of force Torque has units of kg m2/s2 = (kg m/s2) m = N m NET = r FTang = r m aTang = r m r a = (m r2) a For every little part of the wheel
a FTangential F Frandial r For a point massNET= m r2a The further a mass is away from this axis the greater the inertia (resistance) to rotation (as we saw on Wednesday) NET = Ia • This is the rotational version of FNET = ma • Moment of inertia, I≡Simi ri2 , is the rotational equivalent of mass. • If I is big, more torque is required to achieve a given angular acceleration.
Rotational Dynamics: What makes it spin? A force applied at a distance from the rotation axis gives a torque a FTangential NET = |r| |FTang| ≡|r||F| sin q F Fradial r • A constant torque gives constant angularacceleration if and only if the mass distribution and the axis of rotation remain constant.
Torque, like w, is a vector quantity • Magnitude is given by (1) |r| |F| sin q (2) |Ftangential | |r| (3) |F| |rperpendicular to line of action | • Direction is parallel to the axis of rotation with respect to the “right hand rule” • And for a rigid object= I a r sin q line of action F cos(90°-q) = FTang. r a 90°-q q F F F Fradial r r r
Example :Rolling Motion • Newton’s Laws: M N f x dir Mg q Notice rotation CW (i.e. negative) when ax is positive! Combining 3rd and 4th expressions gives f = Max / 2 Top expression gives Max + f = 3/2 M ax = Mg sin q So ax =2/3 Mg sin q
Statics Equilibrium is established when In 3D this implies SIX expressions (x, y & z)
Example • Two children (60 kg and 30 kg) sit on a horizontal teeter-totter. The larger child is 1.0 m from the pivot point while the smaller child is trying to figure out where to sit so that the teeter-totter remains motionless. The teeter-totter is a uniform bar of 30 kg its moment of inertia about the support point is 30 kg m2. • Assuming you can treat both children as point like particles, what is the initial angular acceleration of the teeter-totter when the large child lifts up their legs off the ground (the smaller child can’t reach)? • For the static case:
N 60 kg 30 kg 0.5 m 1 m 300 N 300 N 600 N 30 kg Example: Soln. • Draw a Free Body diagram (assume g = 10 m/s2) • 0 = 300 d + 300 x 0.5 + N x 0 – 600 x 1.0 0= 2d + 1 – 4 d = 1.5 m from pivot point
Recap Assignment: • HW7 due tomorrow • Wednesday: review session