Download
1 / 27
270 likes | 443 Vues
COMPARACION DE ALGORITMOS DE EVALUACIÓN DE CONFIABILIDAD DE SISTEMAS PARCIALMENTE REDUNDANTES. ING. MANUEL A. RIVERA R. Resumen de la Presentación. 1. Introducción 2. Definición y ejemplos 3. Algoritmos de evaluación de confiabilidad 4. Funciones de costo 5. Análisis comparativo

E N D
COMPARACION DE ALGORITMOS DE EVALUACIÓN DE CONFIABILIDAD DE SISTEMAS PARCIALMENTE REDUNDANTES ING. MANUEL A. RIVERA R.
Resumen de la Presentación 1. Introducción 2. Definición y ejemplos 3. Algoritmos de evaluación de confiabilidad 4. Funciones de costo 5. Análisis comparativo 6. Conclusiones y Recomendaciones
Introducción Evolución Histórica de SPR Concepto de SPR. Análisis de confiabilidad. 1980 1990 Algoritmos de confiabilidad. Consideraciones de costo. Análisis de disponibilidad. SPR más específicos. Algoritmos de optimización topológica. 2000
SISTEMAS SERIE PARALELOS SISTEMAS COMPLEJOS SPR Introducción Los SPR y la complejidad + - COMPLEJIDAD
Definición y Ejemplos Tipos de SPR K/N:G, CK/N:F y CCK/N:F No Ponderados Ponderados LCCS Componentes Biestado Componentes Multiestado
1 7 Definición y Ejemplos Sistemas K/N:G no ponderados Este sistema funciona si y sólo si al menos K de sus N componentes están funcionando Sistema de calentamiento de un reactor químico (4/7:G no ponderado)
10 GB 1 20 GB 2 20 GB 3 Definición y Ejemplos Sistemas K/N:G ponderados Este sistema de N componentes funciona si y sólo si la capacidad total de los componentes que funcionan es de al menos K Sistema de servidores de Internet (30/3:G ponderado)
1 2 3 4 Definición y Ejemplos Sistemas CK/N:F no ponderados Esta secuencia lineal ordenada de N componentes falla si y sólo si al menos K componentes consecutivos fallan Sistema de termo-retracción de una máquina empacadora ( C2/4:F no ponderado)
2 bombas 2 bombas 1 2 3 3 bombas Definición y Ejemplos Sistemas CK/N:F ponderados Esta secuencia lineal ordenada de N componentes falla si y sólo si la capacidad total de los componentes consecutivos que fallan es de al menos K Sistema de bombeo ( C3/3:F ponderado)
25 datos 75 datos 1 2 4 3 50 datos 25 datos Definición y Ejemplos Sistemas CCK/N:F ponderados Esta secuencia circular ordenada de N componentes falla si y sólo si la capacidad total de los componentes consecutivos que fallan es de al menos K Sistema de computadoras de una base de datos distribuida ( CC100/4:F ponderado)
0 1 2 3 4 Definición y Ejemplos LCCS Este sistema funciona si y sólo si hay una conexión de la fuente a la carga a través de los componentes que estén funcionando Sistema de telecomunicaciones (LCCS de 3 componentes)
Algoritmos de Evaluación de Confiabilidad Revisión inicial de algoritmos De los últimos 20 años seleccionamos los algoritmos más eficientes y rápidos de la literatura Algoritmos seleccionados WCH01 no ponderados WCH02 Sistemas K/N:G ponderados WCH02 KP01 no ponderados WCH03 Sistemas CK/N:F ponderados WCH03
Algoritmos de Evaluación de Confiabilidad Algoritmos seleccionados WCH04 no ponderados CCH01 Sistemas CCK/N:F ponderados CCH01 ZT01 biestado KP02 Sistemas LCCS multiestado KP02 Programación de los algoritmos Lenguaje Borland C++ 3.0
Funciones de Costo de SPR Modelo general de costo (Suich - Patterson) C = Cs + E{Perdidas} Modelo particular para sistemas K/N:G Cs = NC1 g(W) / K E{Perdidas} = r C2 [1 - R]
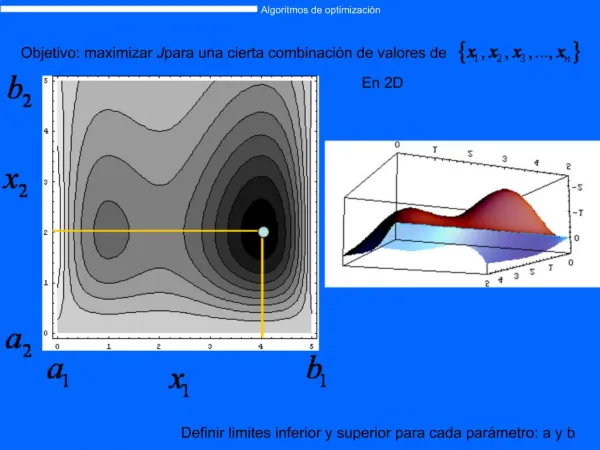
N K sujeta a W Análisis comparativo TE Análisis comparativo Confiabilidad/Costo Tiempos de ejecución de los algoritmos 1. Proceso de cálculo similar N K W Confiabilidad numérica (no simbólica)
TE N, K Análisis comparativo 2. Tiempos de ejecución vs. N, K Supongamos TE=1 ms para un SPR de N=10 componentes y K=2 Si aumentamos N a 100 componentes (K ctte) tendremos que TE ~ 10 ms
N = 10 N = 10 R W C W K K Análisis comparativo Funciones de Confiabilidad y Costo de SPR Sistema ejemplo (K/N:G, CK/N:F, CCK/N:F y LCCS) Funciones de Costo Funciones de Confiabilidad
Análisis comparativo Sistemas K/N:G Parámetro K Parámetro W
Análisis comparativo Sistemas CK/N:F y CCK/N:F Parámetro K Parámetro W Posición relativa de componentes
Análisis comparativo Sistemas LCCS Componentes biestado multiestado
Análisis comparativo Sistemas K/N:G, CK/N:F, CCK/N:F y LCCS Valores óptimos
Conclusiones y Recomendaciones Análisis tiempos de ejecución noponderados Sistemas K/N:G WCH02 ponderados no ponderados Sistemas CK/N:F WCH03 ponderados no ponderados CCH01 Sistemas CCK/N:F ponderados
Conclusiones y Recomendaciones Análisis tiempos de ejecución biestado KP02 Sistemas LCCS multiestado Tiempo de ejecución vs. W ? • Efecto de W WCH02, WCH03 y CCH01 • Nuevos Algoritmos para sistemas ponderados
Conclusiones y Recomendaciones Tiempo de ejecución vs. Componentes multiestado ? • Efecto de componentes multiestado KP02 • Nuevos Algoritmos para LCCS multiestado Restricción en el parámetro W WCH02, WCH03 y CCH01 solo manejan W enteros
Conclusiones y Recomendaciones Análisis funciones de confiabilidad y costo SPR pueden ser más confiables que los sistemas serie y menos costosos que los sistemas paralelos. La confiabilidad de sistemas CK/N:F y CCK/N:F la podemos aumentar con simples cambios de posición relativa de los componentes. Capacidad de los transmisores. LCCS No se estudió la reubicación de transmisores.
Conclusiones y Recomendaciones Modelos de Costo A partir de un modelo general (Patterson-Suich) se proponen cuatro modelos particulares de costo Esto nos permite efectuar un análisis de costo que complementa el análisis de confiabilidad efectuado Integración en algoritmos de sistemas complejos Recomendamos incorporar WCH02, WCH03, CCH01 y KP02 a algoritmos de evaluación de confiabilidad de sistemas complejos.
Conclusiones y Recomendaciones Análisis de Disponibilidad Se recomienda complementar el análisis de confiabilidad y costo efectuado en este trabajo con análisis de disponibilidad Nowicki: Componentes idénticos Función de densidad de tiempo de falla: exponencial Sistema K/N:G