Download
1 / 1
10 likes | 165 Vues
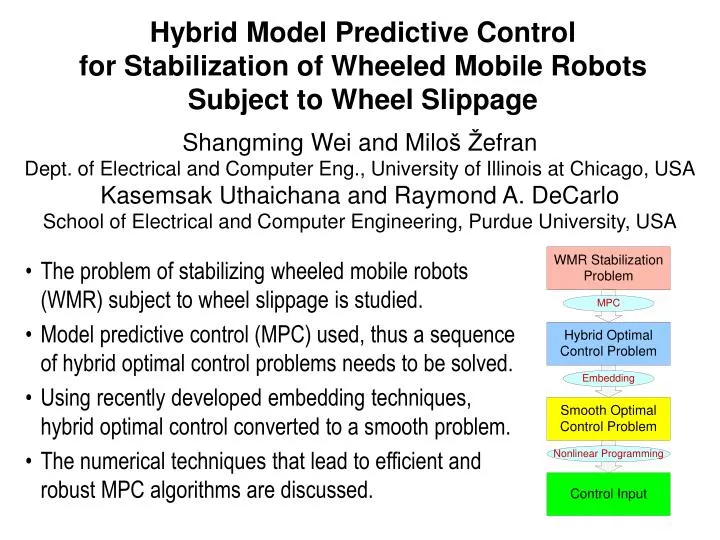
Hybrid Model Predictive Control for Stabilization of Wheeled Mobile Robots Subject to Wheel Slippage.

E N D
Hybrid Model Predictive Control for Stabilization of Wheeled Mobile Robots Subject to Wheel Slippage Shangming Wei and MilošŽefranDept. of Electrical and Computer Eng., University of Illinois at Chicago, USAKasemsak Uthaichana and Raymond A. DeCarloSchool of Electrical and Computer Engineering, Purdue University, USA The problem of stabilizing wheeled mobile robots (WMR) subject to wheel slippage is studied. Model predictive control (MPC) used, thus a sequence of hybrid optimal control problems needs to be solved. Using recently developed embedding techniques, hybrid optimal control converted to a smooth problem. The numerical techniques that lead to efficient and robust MPC algorithms are discussed.