Download
1 / 70
960 likes | 1.64k Vues
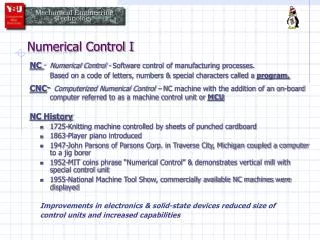
Chapter 9. FUNDAMENTALS OF NUMERICAL CONTROL. HARDWARE AND INTERPOLATORS. Dr. T. C. Chang School of Industrial Engineering Purdue University. • 15th century - machining metal. • 18th century - industrialization, production-type machine tools. • 20th century - F.W. Taylor - tool metal - HSS

E N D
Chapter 9. FUNDAMENTALS OFNUMERICAL CONTROL HARDWARE AND INTERPOLATORS Dr. T. C. Chang School of Industrial Engineering Purdue University
• 15th century - machining metal. • 18th century - industrialization, production-type machine tools. • 20th century - F.W. Taylor - tool metal - HSS Automated production equipment - Screw machines Transfer lines Assembly lines ... using cams and preset stops Programmable automation - NC PLC Robots HISTORICAL DEVELOPMENT
HEXAPOD 6-AXIS MACHINES A Giddings & Lewis Hexapod machine Another hexapod configuration
NEW NCS high speed spindle (> 20,000 rpm) high feed rate drive ( > 600 ipm) high precision ( < 0.0001" accuracy)
• Computer control • Servo axis control • Tool changers • Pallet changers • On-machine programming • Data communication • Graphical interface NC MACHINES MCU - Machine control unit CLU - Control-loops unit DPU - Data processing unit Machine Tool MCU CLU DPU
NC MOTION-CONTROL N C P r o g r a m E x e c u t i o n S y s t e m C o m m a n d s D i m e n s i o n s I n t e r p o l a t o r & T r a n s l a t o r S e r v o - c o n t r o l M e c h a n i s m C o n t r o l L o g i c P o w e r R e l a y L i n e a r M o t i o n S o l e n o i d
1. Motion control: point to point (PTP) and continuous (contouring) path 2. Control loops: open loop and closed loop 3. Power drives: hydraulic, electric, or pneumatic 4. Positioning systems: incremental and absolute positioning 5. Hardwired NC and softwired Computer Numerical Control (CNC) NC MACHINE CLASSIFICATIONS
POINT TO POINT • Moving at maximum rate from point to point. • Accuracy of the destination is important but not the path. • Drilling is a good application.
Controls both the displacement and the velocity. Machining profiles. Precise control. Use linear and circular interpolators. CONTINUOUS PATH
BALL-BEARING-NUT LEADSCREW Preloaded ball-bearing nut Precision ground screw
MACHINE BED Linear ways Bearing Leadscrew
TOOL CHANGE Tool Spindle with a tool Tool change arm
5-AXIS MACHINE Tool Workpiece
Accuracy Repeatability Spindle and axis motor horsepower Number of controlled axes Dimension of workspace Features of the machine and the controller. NC MACHINE RATING
Accuracy = control instrumentation resolution and hardware accuracy. Control resolution: the minimum length distinguishable by the control unit (BLU). Hardware inaccuracies are caused by physical machine errors. NC ACCURACY AND REPEATABILITY
Component tolerances: inaccuracies in the machine elements, machine-tool assembly errors, spindle runout, and leadscrew backlash. Machine operation: Tool deflection (a function of the cutting force), produces dimensional error and chatter marks on the finished part. Thermal error: heat generated by the motor operation, cutting process, friction on the ways and bearings, etc. Use cutting fluids, locating drive motors away from the center of a machine, and reducing friction from the ways and bearings HARDWARE INACCURACIES
Advantages: Large torques and fast responses. Large power/size ratio. Use for large and heavy-duty machines. Disadvantages: High cost. Additional peripherals. Noise. Response lag due to hydraulic fluid viscosity. Contamination from leaking fluid. PRIME MOVERS Hydraulic power drive.
HYDRAULIC POWER DRIVE The servo valve output flow rate: q = k V where: q : output flow rate, in3/s k : valve constant V : signal voltage, volt The power of the motor: p q = T w where: p : input pressure, psi q : input flow rate, in3/s T : output torque, in lb w : angular speed, rad/s v v m m
HYDRAULIC DRIVE (CONTINUE) The steady state rotational speed of the motor: w = K q where: K: motor constant
Stepper motors: Rotates in angular increments. Used in NC, robots, printers, plotters, VCRs, cameras, etc. Rating: torque, from 1 oz-in to several hp. step angle: 0.72° to 90°; 1.8°, 7.5°, and 15° are most popular. For each input pulse (signal), the motor shaft advance one step. ELECTRIC POWER DRIVES
A simple stepper motor with two pairs of stator electrical magnets and a single permanent magnet rotor. The motor has four steps per revolution. STEPPER MOTOR PRINCIPLES Turn off coil set 2 and turn on coil set 1. The rotor rotate to a horizontal position. Coil set 2 is energized, rotor is attracted to the vertical position.
The control shown in the previous slide is for full step control. With smart control, the same motor can have higher step resolution. Following are two strategies used in motor control. HALF STEPPING AND MICRO-STEPPING Micro stepping: turn the coil on at different power level. The rotor rotates proportional to the strength of the fields. Half stepping: turn both sets of coil on. Rotor rotates at 45 degree.
To increase the resolution of a stepper motor, more poles are added to the rotor. By doing so, smaller stepping steps can be made. A PRACTICAL STEPPER MOTR
BIPOLAR AND UNIPOLAR MOTORS Each coil only takes current in the fixed direction. Often there is a center power lead for each set of the coils (see the motor drawing on the next page.) The coils take bi-directional current to control the motor rotation.
STEPPER MOTOR AND DRIVER Unipolar winding, 6 leads. Center leads are for power. Stepper Motor Allegro MicroSystems UCN5804B BiMOS II Unipolar Stepper-motor Translator/Driver
STEPPER MOTOR CONTROL Rotation controlled by pulse sequence on the signal leads (connect to ground). Step S1 S2 S3 S4 1 1 0 1 0 2 1 0 0 1 3 0 1 0 1 4 0 1 1 0 1 1 0 1 0 Clockwise stepping Counter clockwise stepping
EXAMPLE Turn a 1.8° step angle motor 2000 steps at 360 rpm, what is the number of pulses and pulse rate to be sent to the motor? The number of pulses should be the same as the desired steps. It, therefore, is 2000 pulses. 360 rpm = 360 (rotation/min) / 60 (second/min) = 6 rotation/second Number of steps per rotation, N: N = 360°/1.8° = 200 steps/rotation Pulse rate = 6 (rotation/second) x 200 (steps/revolution) = 1,200 pulses/second
Advantages: Digital input. Accurate positioning with non- cumulative errors. simple and rugged construction. Bi-directional rotation and control with no additional control complexity. Disadvantages: Loss of synchronization at certain operating range. STEPPING MOTORS (continue)
TORQUE VS STEPPING SPEED Each motor has its own torque characteristics. However, for all motors, torque drops at higher speed. Torque Stepping speed (steps/second)
Select motor torque requirement Torque = Fxr where F: load force, r: radius of arm MOTOR SIZING F r For a disc, I: moment of Inertia lb-in2 , w: weight For a cylinder a: angular acceleration, rad/sec2 Torque required: q: step angle (degree) w : step rate (steps/second) Io: total inertia (motor+load) lb.in2 T: oz. in
Motor controlled using a feedback mechanism. A transducer feedback and a speed control forms a servo loop. DC & AC servos. DC: speed controlled by voltage AC: speed controlled by frequency SERVO MOTORS A DC permanent magnet motor A DC servo motor system
DC brush motor and DC brushless motor. DC brush motor is most popular and easy to control. Three coil windings on the rotor and two permanent magnets on the stator. Coil c1 is energized. The magnetic field pull it toward the permanent magnet pole. Immediate after it lined up with the permanent magnet, the power is disconnected and coil c2 is energized. Continue these steps, the rotor will keep turning. The connection of power to the coil at the right time is called “commutation”. Commutation is achieved by commutation bars and two carbon brushes. DC MOTORS S Rotor
COMMUTATORS Six commutator bars for three sets of coils. Brush Coils
BUILD YOUR OWN MOTOR Following is a motor with one coil winding (Figure 1). It needs a gentle push to start the rotation. Use coated transformer wire to loop around a AA battery about 10 times. Leave 2” leads on either end. Use scotch tape to keep the loop together. It is important that the leads come out of the center of the loop (see figure 2), so the rotor will be balanced. The coil is turned on for half of the rotation (see figure 3) Remove coating completely on this end of the lead. Sand away only the top half of the coating. AA battery Permanent magnet Rotor coil Figure 2 Connector (paper clip) Commutation is done half the rotation when the exposed wire has contact with the connector. Rotor coil Figure 1 Figure 3
A brushless motor has windings on the stators and the rotor is made of permanent magnet. It requires electronic commutation. The position of the rotor is detected by sensors. The stator is activated in sequence by the controller based on the rotor position. Unlike stepper motor, brushless motor makes continuous rotation instead of stepping. More complex control, smooth rotation. BRUSHLESS DC MOTOR
Induction motor Squirrel cage induction motor Wire-wound induction motor Magnetic field from the stator is induced into a conductor on the rotor. This induced current establishes a magnetic field around the rotor's conductor in the opposite polarity. The stator does not move. However, the alternative current generate rotating magnetic field. AC MOTORS
SQUIRREL CAGE ROTOR AC current induced into the rotor by the fields on the stator. The current in the rotor generates a magnetic field which pulls the rotor to follow the changing stator field (due to AC).
AC MOTOR PRINCIPLES Two-phase voltage for developing a magnetic field in a stator A single phase motor (use a capacity to provide the starting power) Three-phase motor is omitted from this page.
Wound rotor motors: Instead of using induction, the rotor consists of electric magnets. Slip rings are used to pass the AC current to the rotor windings. For high power and low rpm motors. Synchronous motors: designed to run at a constant speed. Modified squirrel cage design to enable the rotor to lock onto the rotating magnetic field of the stator. Use for very large industrial applications, or low power applications in clocks and timing devices. Universal motors: Use commutator. Can use both AC and DC power. Vacuum cleaners, food mixers, portable drills, etc. Low power. OTHER AC MOTOR TYPES
AC motor is controlled by the input voltage frequency. The rotor is usually lagging behind the changing magnetic field in the stator (slew). Based on the design (number of poles) each motor is rotated at a multiple of the power frequency. Motor speed = AC frequency/# of poles in the stators * 120 It is more difficult to change the frequency of high current power than changing voltage as it is in DC motor control. AC motor control thus costs more. AC MOTOR CONTROL
A transducer is a device which transforms one physical phenomenon to another. Speed transducer Tachometer, which is a DC generator. where v = output voltage, volts w = shaft angular speed, rad/s = tachometer constant, volt/rad TRANSDUCERS
TRANSDUCERS (continue) Position transducer: Encoders - digital f = K w where f = output pulse frequency, pulse/s w = input angular speed, rpm K = encoder gain e e Incremental encoder: angle rotated (in pulses) Absolute encoder: shaft rotation angle (in a binary number)
TRANSDUCERS (continue) Resolvers The output of a resolver is: v = V sin(w t +j ) where V = input voltage, volt j = shaft angle w t = input signal phase Rotation angle is measured by the phase change.
TRANSDUCERS (continue) LVDTs. Linear Variable Differential Transformer The output shows the difference between two coils. When the armature is in the central position, the output is zero. Range from micro inch to inches. Repeatability in a few micro inches. AC Excitation AC output sine wave armature (moveable magnetic core)