Download
1 / 57
570 likes | 805 Vues
Pattern Formation for Heterogeneous Multi-Robot Systems. Nuttapon Boonpinon 4870340721 Advisor Dr. Attawith Sudsang Department of Computer Engineering ,Chulalongkorn University. Why Multi-Robot ?. Some task can’t be done by a single robot. Why Multi-Robot ?.

E N D
Pattern Formation for Heterogeneous Multi-Robot Systems Nuttapon Boonpinon 4870340721 Advisor Dr. Attawith Sudsang Department of Computer Engineering ,Chulalongkorn University
Why Multi-Robot ? • Some task can’t be done by a single robot
Why Multi-Robot ? • Require more than one type of robot
Why Multi-Robot ? • Robustness and False Tolerance is required
Multi-Robot vs. Single Robot Go! Get the Ball
Multi-Robot vs. Single Robot Do you see the ball? Go! Get the Ball Do you see the ball? Do you see the ball?
Multi-Robot vs. Single Robot I will get it Go! Get the Ball @#$@$ No, you get it You Get it I will get it
Multi-Robot vs. Single Robot Go! Get the Ball 10
Multi-Robot Research Areas Task Allocation / Task Planning Communication Protocol Cooperative Mapping / Localization Motion Coordination / Pattern Formation Motion Coordination / Pattern Formation
Multi-Robot Pattern Formations Global Planning Navigation Local Planning Obstacle Avoidance Control PID , other control system Sensors Locomotion Range Sensor / Motor
Multi-Robot Pattern Formations Pattern Formation Global Planning Global Planning Global Planning Local Planning Local Planning Local Planning Centralized Pattern Formation Control Control Control Sensors Sensors Sensors Locomotion Locomotion Locomotion robot3 robot2 robot1
Multi-Robot Pattern Formation Formation Algorithm “
Multi-Robot Pattern Formations Pattern Formation Pattern Formation Pattern Formation Global Planning Global Planning Global Planning Local Planning Local Planning Local Planning Decentralized Pattern Formation Control Control Control Sensors Sensors Sensors Locomotion Locomotion Locomotion robot3 robot2 robot1
Multi-Robot Pattern Formation Formation Formation Formation Formation Formation Formation
Multi-Robot Pattern Formation Formation Formation Formation Formation Formation Formation Global Communication
Multi-Robot Pattern Formation Formation Formation Formation Formation Formation Formation Local Communication
Multi-Robot Pattern Formation Formation Formation Formation Formation Formation Formation No Communication
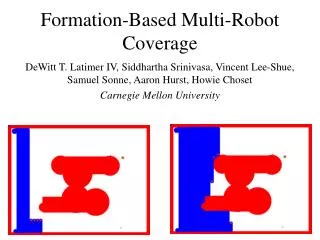
Robotic Traffic Barrel Land-mine Detection Multi-Robot Formation Application
Literature Review :: Multi-Robot Formation Early Researches :: Arai 89, Reynolds 87a,b Centralized ::Farritor02, Manuela96 Decentralized ::Parker 93 , Balch98Mataric 02, Desai 02,
Early Research :: Reynolds’ Boid • A distributer behavior model • Used in animation to reduce animators’ work involving many agents • Used in “Batman Returns”
Centralized Pattern Formation • Farritor ’02 “Intelligent Highway Traffic Barrel” • Forming a robotic traffic barrel taper • Each barrel’s cost must be low enough to allow frequent replacements. • A lead robot is used to command each barrel
Decentralized Pattern Formation :: Balch 98 • Balch’98 “Behavior-based Formation Control for Multi-robot Teams” • Propose 4 types of formation 3 4 1 2 Line Formation 1 2 Column Formation 3 4
Decentralized Pattern Formation :: Balch 98 3 2 Wedge Formation 1 4 2 Diamond Formation 3 1 4
Decentralized Pattern Formation :: Balch 98 • Use motor schema control scheme Move to Goal W Avoid Static Obstacle W ∑ Output Maintain Formation W Avoid Robot W
Decentralized Pattern Formation :: Balch 98 • 3 type of location determination Unit Center Leader Reference Neighbor Reference
Decentralized Pattern Formation::Desai 02 • Desai ’02 “A graph theoretic approach for modeling mobile robot team formations” • Use graph to represent formation relationship between robot l l l l-l relation l- relation
Decentralized Pattern Formation Formation Formation Formation Formation Formation Formation
Communication Robot Multi-Robot Single Robot Centralized Decentralized No Communication Local Communication Global Communication
Robot Robot Sensing Range Robot Model d θ Distance d and angle θcan be sensed by the robot Each robots can identify type of robots in range
Heterogeneity Image Image CO2 Oxygen Oxygen CO2
Our Problems • Decentralized Pattern Formation for Multi-Robot Systems • But, What kind of formations ? Line? Diamond? No… • Heterogeneity Squad Formation Circular Formation Constrained Coverage
Circular Formation • Arrange heterogeneous robot group into single circular shape
Circular Formation • Challenge • Circularity is a global property • But we can measure only local • No explicit geometric properties in each agent
Related works :: Circular Formation • Sugihara and Suzuki ‘99, • “Distributed Algorithms for Formation of Geometric Patterns with Many Mobile Robots” • Each robots follow this rule • If distance between itself and the furthest robot is more than diameter of circle then move toward that robot • Else, move away from the closet robot
Related works :: Circular formation • Sometime converged to Reuleaux's Triangle • Need information of all robot in workspace • Embodied explicit geometric properties of circle in algorithm Reuleaux's Triangle
Squad Formation • Form a squad composed of k predefined types and distribute squad to cover the workspace Initial workspace Final workspace
Squad Formation • Challenges • No global information, do not know where agent should head • Limited communication • Scalability
Related Works :: Squad Formation • Nguyen et. Al. ‘03 “Autonomous Communication Relays for Tactical Robots” • Composed of ‘Master’ and ‘Relay slave’ • Relay slave keep communication MasterBase alive
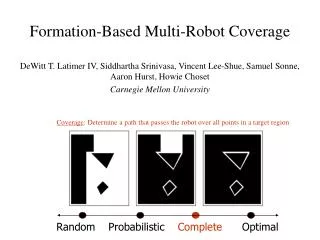
Constrained Coverage • Uniformly cover the workspace only in their corresponding region
Constrained Coverage Initial Workspace Final Workspace
Constrained Coverage • Challenge • No prior knowledge about map • No absolute localization • Uniformly cover the workspace • Cover workspace only space that related to agents’ type
Related Works :: Constrained Coverage Coverage Non-Constrained Constrained Communication Range Potential Field Based Voronoi Based Communication Type
Related Works :: Constrained Coverage • Howard et. Al. ‘02 “Mobile Sensor Network Deployment using Potential Fields: A Distributed, Scalable Solution to the Area Coverage Problem” • Self-Deployment • Implement artificial potential field to disperse mobile sensor network nodes
Related Works :: Constrained coverage • Tan et. Al. ’04 “Modeling Multiple Robot Systems for Area Coverage and Cooperation “ • Robots move to centroid of voronoi region
Related Works :: Constrained Coverage • Rekleitis et. Al.‘03 “Limited Communication, Multi-Robot Team Based Coverage” • Dynamic Coverage • Line of sight communication • Cell-Decomposition based