Download
1 / 20
200 likes | 357 Vues
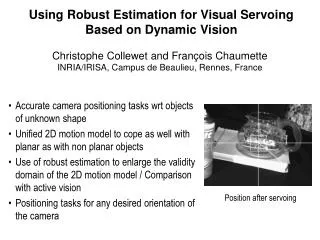
Ezio Malis, Eric Marchand INRIA Sophia, projet ICARE INRIA Rennes, projet Lagadic. Robust estimation techniques in real-time robot vision. Overview. Introduction Robust estimation methods M-estimators LMS and LTS Robust voting methods Hough transform RANSAC (Random Sample Consensus)

E N D
Ezio Malis, Eric Marchand INRIA Sophia, projet ICARE INRIA Rennes, projet Lagadic Robust estimation techniques in real-time robot vision
Overview • Introduction • Robust estimation methods • M-estimators • LMS and LTS • Robust voting methods • Hough transform • RANSAC (Random Sample Consensus) • Application to robotic vision • Object tracking • Visual servoing
Introduction • Goal : estimation of a set x of parameters from • n signals measurements • A model of these signals • Let us define the residual • In the ideal case we have to solve : • Unfortunately, in the general case • Measurements are not exact • Models do not correspond to reality
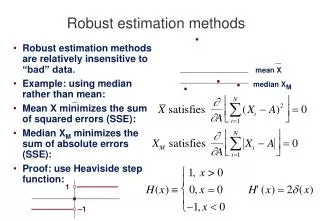
Definitions • Outlier : • An outlier is an aberrant measure • Robustness of the estimation • An estimation algorithm is said to be robust if its properties are maintained despite the presence of outliers • Breakdown point • This the minimum percentage of outliers which make the algorithm diverge
Case study • Estimation of the displacement between two views • Knowing
Least of squares • We look for the solution of • Where the cost function is defined by • The optimization is performed iteratively from x0 • The solution is optimal if measurement noise is Gaussian Ideal case 20% of outliers
M-estimators [Huber81] • The cost function is modified such that: • Various choice for • Large errors are penalized • Usually require the computation of a threshold • Efficient implementation using IRLS (Iteratively Reweighted Least Squares) • Correct minimum is usually found, • Theoretical breakdown point is still 0%
Tukey M-estimators • Weights in IRLS • Threshold c is given by: • with the scale computed using the MAD • This cost function is not differentiable with
Tukey M-estimator: Case study • 20% of outlier 40% of outliers • The minimum is correctly locate but • New local minima appears • The cost function is not differentiable
Least Median of Squares [Rousseeuw87] • Minimize the following cost function • Cost function usually not differentiable • High theoretical breakdown point : 50% • Highly expensive minimization
Least Median of Squares: Case study • 20% of outlier 40% of outliers • New local minima appears • Outliers are suppressed, … along with inliers
Hough transform • Several alternative have been proposed • General overview • Discretization of the parameters space (hypercubes in the space state) • Accumulators are associated with these hypercubes • Estimate x from a minimal set of measures • Each estimation is a vote • Accumulator with the most significant value gives the best estimate • Main issues • How to discretize ? • Search space increases exponentially with the number of parameters • Very robust
RANSAC (Random Sample Consensus)[Fischler 81] • Minimize the following cost function • with the threshold c computed using the MAD • This is a non exhaustive voting method (only m random samples) • For each sample • Estimate using a minimal sample set • Compute
RANSAC: Case study • 20% of outlier 40% of outliers • 20% of outliers: m=5 samples, p = 95% • 40% of outliers: m=13 samples, p = 95%
Robust tracking • Homography estimation • Robust version of the ESM • algorithm [Benhimane-Malis 04] • Uses M-estimators Image EAVR - LSIIT - ULP Strasbourg
Robust visual servoing • Visual servoing • Control a dynamic system degrees of freedom in order to reach a desired position specified in an image • Robust visual servoing • Ensure the task despite the presence of aberrant data (outliers) • Various approaches • Robust image processing algorithms • Robust control laws
Robust visual servoing • Robust tracking algorithms • Classical 2 1/2 D control law • Contour-based tracking • [Comport IROS’04] • Hybrid Contour/texture tracking • [Pressigout ICRA’06]
Robust visual servoing • Robust tracking algorithms • Classical 2 1/2 D control law • Tracking by matching • Keypoint recognition using randomized tree • Homography estimation • RANSAC outlier rejection • [Tran 06] • Handle large (complete) occlusions
Robust visual servoing • Classical tracking algorithms • Robust control laws [Comport, ITRO’06] based on M-Estimators • No robust Robust
Conclusions • Short review of robust estimation methods • Robustness is necessary to handle robotic task in real environment • A trade-off has to be find between • Efficiency • Robustness • Voting techniques (Hough, RANSAC) along with LMS, LTS are • very robust although very expensive • M-estimation is a very good trade-off