Download
1 / 30
300 likes | 436 Vues
Adaptive stabilization using a variable sampling rate. Author: D. H. OWENS Reporter: BO LI. November, 7, 2011 • CSOIS • Utah State University. Abstract.

E N D
Adaptive stabilization using a variable sampling rate Author: D. H. OWENS Reporter: BO LI November, 7, 2011 • CSOIS • Utah State University
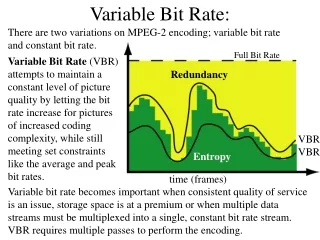
Abstract • The theoretical problem of adaptive stabilization of single-input single-output(SISO) linear systems S(A,B,C) in is approached using the sampling rate as the basic adaptive mechanism. • A wide range of sample interval adaptation schemes is derived that guarantees global asymptotic stability of the sampled outputs from the plant for any minimum-phase SISO systems satisfying the relative degree one constraint
1. Introduction (1).Continuous-time system • Globally asymptotically stable:
Assumption • 1. , sampling interval is non-increasing. • 2. • 3. • 4. S(A,B,C) is SISO, minimum-phase, linear, time-invariant system, relative degree one, CB ≠0. • 5. C=(1,0,0,……)=
2.Problem statement • S(A,B,C) is globally asymptotically stabilized in the sense that (The problem of stabilization of the state is an important problem but can be guaranteed under well-defined mathematical conditions) Recursion relation with update formula
Lemma1 • Lemma2. Under the conditions of Lemma1 and the extra assumption that , then there exists a sample interval and a real number μ >0 such that, for all and for all
3. Adaptive stabilization 3.1 The case where the sign of CB is known • Lemma3. Suppose that S(A,B,C), CB is known to lie in the range defined by There exist real numbers such that, for all j ≥0,
Theorem 1:Let be an entire function with Suppose that the (variable) sample intervals are updated at each sample using the recursive formula with arbitrary. Suppose also that k(h) is a gain parameterization satisfying Assumption. Then the feedback control law will globally stabilize all linear systems S(A,B,C) satisfying .
Proof: Let and be arbitrary. Note is non-increasing and bounded from below by zero. As a consequence exists and is ≥0. it is clear that asymptotic stability conditions are required. The only other possibility is that . To verify that this is impossible note that the conditions of Lemma3 hold true and hence, for all j ≥0 The uniform boundedness of the summation implies that from (*) which is a contradiction.
3.2 The case where the sign of CB is unknown • Theorem 2. Consider the control law Satisfying Assumption 1-3 where (a) the sample intervals are updated using formula where is an entire function with d=2, and is chosen arbitrarily; (b) an auxiliary scalar switching activation sequence is computed from the (non-decreasing) recursion relation with arbitrarily chosen; and
(c) the switching sequence is generated from any causal procedure P with the property that, if is divergent then, for all and for all j≥0, there exists indices l and m greater than or equal to j such that and Then the resultant (nonlinear) adaptive closed loop system is globally asymptotically stable in the sense that
3.3 A note on intersample behavior With , if the constant h=1, y(t)=sin(2πt) will produce the sampled sequence If, however, , an inductive argument indicates that for all j≥0, that and that y(t)=sin(2πt) is unchanged. Clearly the closed loop system is not asymptotically stabilized to the origin of the state space!
Corollary1.1: Under the conditions stated in Theorem 1, the specified adaptive scheme will stabilize any given linear SISO system S(A,B,C) satisfying in the extended sense that for all choices of sufficiently small initial sampling interval
4.Conclusion • Digital implementation of ‘high-gain’ global adaptive stabilization algorithms can lead to instability if a constant sampling rate is used. • This problem can be theoretically offset and the property of global stabilization retrieved if the sampling rate is systematically varied as an adaptive parameter.
<1> Adaptive Sampling Control of High-Gain Stabilizable Systems ------ Achim Ilchmann • Theorem1. Define the adaptive-sampling output output feedback law by
With Furthermore: Theorem2.
Moreover: Conclusions: The adaptive sampling rate is used to counter the increasing stiffness of the closed-loop system caused by an increased gain which is needed to exploit the stability of the zero dynamics.
<2> Adaptive high-gain λ-tracking with variable sampling rate ----Achim Ilchmann Theorem. Let λ,γ>0, Suppose system is minimum phase, and the “sign” of the high-frequency gain is known. Then the adaptive sampling output feedback law Where are generated by the gain and sampling-time adaptation mechanism
When applied to system results in a closed-loop system which admits a unique solution x(.) on [0, ∞). Moreover,
Discussion • Switch among several periods which are set at the beginning • With adaptive update law
Applied in NCS • Delay • Noise • Non-uniform
Reference • 1. D. H. Owens, “Adaptive stabilization using a variable sampling rate”, INT. J. Control, 1996, Vol 63, No.1,107-119; • 2. AchimIlchmann, Stuart Townley, “Adaptive Sampling Control of High-Gain Stabilizable Systems”, IEEE Transaction on Automatic Control, Vol. 44, No. 10, October, 1999,1961-1966; • 3. AchimIlchmann, Stuart Townley, “Adaptive high-gain λ-tracking with variable sampling rate”, Systems & Control Letters 36 (1999) , 285-293

![AMR (Adaptive Multi-Rate]](https://cdn1.slideserve.com/2939494/amr-adaptive-multi-rate-dt.jpg)