Download
1 / 7
70 likes | 232 Vues
Status Report: Preliminary Integration Results Grégory Pohu – Viveris Technologies (France) for RENAULT S.A. 25th November, 2008 SP1 – SP4. Background Vehicles: Renault Espace & Laguna III Test Site: West – Site France Applications: Intersections Related Partnerships:

E N D
Status Report: Preliminary Integration Results Grégory Pohu – Viveris Technologies (France) for RENAULT S.A. 25th November, 2008 SP1 – SP4
Background • Vehicles: • Renault Espace & Laguna III • Test Site: West – Site France • Applications: • Intersections Related • Partnerships: • Continental for demonstrations • Key Characteristic: • Potential capability to log vehicle geo tagged dynamics at 10Hz
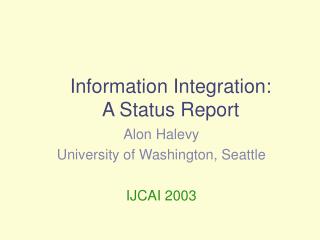
GPS antenna GPS antenna VANET Modem Emulation Vanet PC Trajectometer High grade GPS receiver IMU + CPU Odometry interface Position PC Main PC Application PC Vehicle Gateway Vehicle CAN-bus Vehicle Layout: block diagram representation
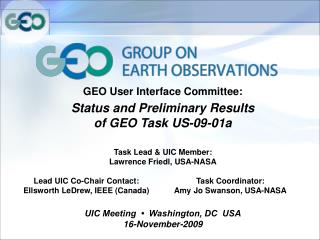
LAPTOP (?) Equipment Layout Positioning PC Axiomtek : eBox638-FL Hosts SP1 and LDM Software Main PC Aeon : AEC-6920 Generates Signals Safespot Positioning CAN Ethernet Switch NETGEAR : FS108p 8 Ethernet ports Links all computers WAVE Wireless Viveris : CVS FM6000 Host Access software to Vehicle CAN-Bus Generates vehicle data Gateway CAN / Ethernet Renesas WAVE Wireless Communication Device Transmits and Receives data from VANET VANET PC Applications PC VS-EmRunner Runs Vanet SW Axiomtek : eBox638-FL Hosts Intersection Applications
ESPOSYTOR LAPTOP Software Integration Status Positioning PC • NTP client • PostgreSQL server (v8.2) • PostGIS (v1.3.2) • OpenJump (v1.2.h) • Dortmund (PG) LDM and map data (v2) • SP1 framework for PG (v 7.2) • ADASRP server • Navteq LDM (v6.0) • Geometric Map data of La Brosse area • SP1 framework for NQ (v 7.2) • GPS system time updater • NTP server • IP setting • Haliburton / UDP Safespot Position converter Main PC • WAVE software from Hitachi • Ethernet / Wireless player Gateway CAN / Ethernet SWITCH Hitachi Modem - NTP client - IP setting - CAN vehicle / UDP Safespot converter • OS + tools • Message framework from CRF • - NTP client • - IP setting • Continental Application Manager • Renault SP4-1F dll application • Continental SP4-1x applications • HMI Manager • Message Manager Applications PC RENAULT VANET solution
Positioning System From GPS antenna 2 GPS From GPS antenna 1 To Main PC GPS IMU (Landins) From vehicle for Renault Espace From B2i FM6000 for Renault Laguna Odometer • Haliburton / Safespot position converter • Haliburton / Safespot position simulator • Time Updater based on GPS • NTP server • Positioning algorithm from TUC
Major Issues • No map-matching, no applications • Still to run VANET and issue of access to Navteq-LDM pending • Localisation is a temporary solution. Safespot solution to be tested • Need the completion of the west-site geometry, LDM Others • Still to do the complete integration • Have not tested our application • Schedule is overshooting and might run into resource allocation issues • Implementations in Valladolid ?