Download
1 / 58
710 likes | 1.19k Vues
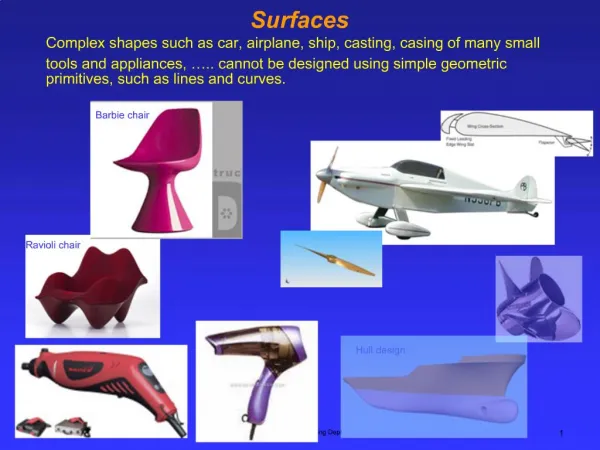
Surfaces Surfaces of revolution Sweep surfaces Parametric surfaces Quadric surfaces Bilinear surface Ruled surface Linear Coons surface Coons bicubic surface Bezier surface B-spline surface Rational B-spline surface. Surfaces of Revolution

E N D
Surfaces • Surfaces of revolution • Sweep surfaces • Parametric surfaces • Quadric surfaces • Bilinear surface • Ruled surface • Linear Coons surface • Coons bicubic surface • Bezier surface • B-spline surface • Rational B-spline surface
Surfaces of Revolution • A very simple family of surfaces is obtained by rotating a plane curve around an axis. For example, let C(t) be a curve on XZ Plane, a surface can be generated by rotating C(t) about Z-axis. Any point on the surface of revolution is a function of two parameters, t and . The parameter t describes the entity to be rotated, and is the angle of rotation around the Z-axis. So, • C(t) = [x(t), 0, z(t)] • S(t,) = [x(t)cos , x(t)sin , z(t)] • In matrix form: • / \ • S(t,) = [x(t) 0 z(t) 1] | | • \ / • 11.4
Surface of revolution generated by: • (Assume the curve are on the firsst quadrant of the XZ plane) • (a) line segment parallel to Z-axis (Cylinder). • (b) line segment which is not parallel to Z-axis (truncated cone). • (c) line setment parallel to X-axis (Hollowed disc). • (d) a circle (torus). • (e) cubic Bezier curve. • (f) others. • 11.2, 11.3(a),(b), 11.5, 11.6 • Picture from Anand's book.
6.1 • Cylindrical surface of revolution. (a) Schematic; (b) result. • 6.2 • Conical surface of revolution. (a) Schematic; (b) result. • 6.3 • A disc as surface of revolution. (a) Schematic; (b) result.
6.4 • A surface of revolution from a closed polygon. (a) Schematic; (b) result. • 6.5 • Biparametric surface of revolution. • 6.8 • Surfaces of revolution. (a) Paraboloid; (b) hyperboloid.
6.7 • Tori. (a) Circular cross section; (b) elliptical cross section. • 6.9 • Parabolically blended surface of revolution. (a) Generating curve; (b) surface.
6.10 • B-spline surface of revolution. (a) Polygon vertices; (b) B-spline curves; (c) surface. • Picture from Rogers and Adams' book.
Example: Generate the surface obtained by rotation of the line segment AB with A=(1,0,1) and B=(3,0,1) around the Z-axis. • What the surface look alike if the line segment AB intersect the Z-axis? Y X Z Y X Z
Example: Generate the surface obtained by rotation of a circle contained in XZ plane around the Z-axis. The center of the circle has coordinates (a,0,0) and the radius of the circle is r (a > r). • What the surface look alike if a <= r? • What the surface look alike if the circle centered at the origin. Y X Z
For any curve C(t) on XZ plane, the surface of revolution is represented in matrix form as: • / cos sin 0 0 \ • S(t,) = [C(t) 1] | 0 0 0 0 | • | 0 0 1 0 | • \ 0 0 0 1 / • Example: Consider the surface of revplution generated by a cubic Bezier curve defined by the control points P1=(1,0,2), P2=(3,0,4), P3=(2,0,6), P4=(5,0,7) rotating about the Z-axis. Calculate the point on the surface at t=0.5, =/4.
How to rotated a parametric curve about an arbitrary axis? • 6.11 and 6.12 • Picture from Rogers and Adams' book.
Surfaces • Surfaces of revolution • Sweep surfaces • Parametric surfaces • Quadric surfaces • Bilinear surface • Ruled surface • Linear Coons surface • Coons bicubic surface • Bezier surface • B-spline surface • Rational B-spline surface
Sweep Surface • A sweep surface is obtained by traversing an entity, e.g., a line, polygon, or curve, along a path in space. • The sweep surface is represented in parametric form as: • S(t,s) = C(t)T(s) • where C(t) is the parametric equation of the line or curve and T(s) is the sweep transformation based on the shape of the path. • 11.7 • Translational sweep and rotational sweep. • Picture from Anand's book.
If the path is a straight line starting at the origin along the Z-axis, what T(s) looks alike? • T(s) = • If the path is a straight line starting at the origin, and the path can be represented in parametric form as [X(s) Y(s) Z(s)] = [as bs cs], what T(s) looks alike? • T(s) = • If the path is an origin-centered circle in a z=constant plane, what T(s) looks alike? • T(s) =
Example: Sweep the normalized cubic spline curve segment defined by P1 = (0,3,0), P2 = (3,0,0), P1' = [3 0 0], P2' = [3 0 0] 10 units along the z-axis. • 6.14 • From Rogers and Adams' book.
Example: Consider the line segment in the XY plane and parallel to the y-axis defined by end points P1=(0,0,0) and P2=(0,3,0). Determine the point at t=0.5, s=0.5 on the sweep surface generated by simultaneously translating the line 10 units along the axis and rotating it through 2 about the x-axis. • 6.13 • From Roger and Adams' book.
Surfaces • Surfaces of revolution • Sweep surfaces • Parametric surfaces • Quadric surfaces • Bilinear surface • Ruled surface • Linear Coons surface • Coons bicubic surface • Bezier surface • B-spline surface • Rational B-spline surface
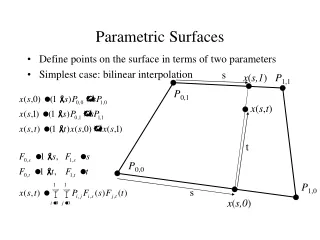
Parametric Surfaces • The simplest mathematical element we use to model a surface is a patch. A patch is a curve bounded collection of points whose coordinates are given by continuous, two-parameter, single-valued mathematical function of the form: (0 <= s,t <= 1) • S(s,t) = [x(s,t), y(s,t), z(s,t)] • The following surface is created by a mesh of curve along the s and t parametric directions. • 11.1 anand • Compare with the definition for curve segment: (0 <= t <= 1) • C(t) = [x(t), y(t)] t 1 s 0 1 C(1) 0 t 1 C(0)
Example: Find the surface patch for the rectangular segment of the X-Y plane with (a,b,0), (a,d,0),(c,b,0) and (c,d,0) as vertices. • Example: Find the parametrize respresentation for the sphere centered at (a,b,c) with radius r. (From Mortenson's book) • 3.3 Y t=1 d s=0 s=1 b t=0 X a c
We have the following questions for the parametric form of surface patches: • 1. How to find the normal of the surface patch at a point? Why we want find the suface normal? • 2. How to display the surface patch? • 3. Is it possible to have degenerate patches? If yes, give examples for the degenerate patches corresponding to a point and a line.
Surfaces • Surfaces of revolution • Sweep surfaces • Parametric surfaces • Quadric surfaces • Bilinear surface • Ruled surface • Linear Coons surface • Coons bicubic surface • Bezier surface • B-spline surface • Rational B-spline surface
Quadirc Surfaces • The natural quadric surfaces, the sphere, cone, cylinder, ellipsoid, paraboloid of revolution and the hyperboloid of revolution, are also surfaces of revolution. These natural quadric surfaces, especially the sphere, cone and cylinder, play an important part in the manufacture of mechanical parts. • Given the examples of physical object whose shape has part of natural quadric surfaces. • basketball --------------- • funnels ------------------- • beer cans --------------- • satellite antennas ----- • There are two methods for representing quadric surfaces, algebraically and geometrically.
Algebraic Descriptions of Quadirc Surfaces: The general quadric surface is given by: • a200x2+a020y2+a002z2+a110xy+a011yz+a011xy+a100x+a010y+a001z+a000=0 • This general quadric equation can be written in matrix form as [X][A][X]T = 0 where • [X] = [x y z 1] • [A] = • Let's try to eliminate the linear tems. • Assume a translation can eliminate the linear terms. After the translation, the matrix form becomes: • [X][Tr][A][Tr]T[X]T = [X][A'][X]T = 0 • where the translation matrix is: • [Tr] =
The transformed matrix [A'] is: • [A'] = • Eliminating the linear terms, yields • [M][L] = [G] • where • [M] = [L] = • [G] =
If [L] is invertible, a solution exists and the quadric is central (sphere, cone, cylinder, ellipsoid, or hyperboloid). Otherwise, the quadric is noncentral (paraboloid). • Let's extend the idea we have learned in conics and assume that: • If del[L]>0, then the quadric is ellipsoid. • If del[L]=0, then the quadric is paraboloid. • If del[L]>0, then the quadric is hyperboloid. • What's wrong with this assumption? • Hint: f(x,y,z) and -f(x,y,z) should represent the same surface, but their corresponding del[L] have different sign.
How can we determine whether a quadric is a ellipsoid, paraboloid, or hyperboloid?
As with the conic sections whether [L] is singular or not, the axes of a quadric can be made parallel to the coordinate axes by rotation. Here, three rotations are required, two to make one of the axes of the quadric parallel to a coordinate axis and a final rotation about the axis to make the other two axes of the quadric parallel to the other coordinate axes. Now, a110, a101 and a011 will be zero. • Similarly, if the quadric is noncentral, i.e., a paraboloid, as mentioned previously the linear terms cannot all be eliminated. However, two of the three linear terms can be eliminated. • The result of these operations is to place the quadric in the standard form. For the central quadric the standard form is with the center at the origin and the axis aliged with the coordinate axes. In matrix form the result standard form equation is: • [X][A][X]T = 0 • where • [A] =
Quadric Surfaces • Fig 6-18 Rogers • from Rogers
Example: Transform the following quadric into standard form and determine the type of the quadric: • 2xy - x - y + z = 0
Geometric Descriptions of Quadric Surfaces: Every quadric surface is represented by a point, two orthogonal (unit) vectors and three scalars. The point, either center or vertex, fix the location of the surface. The vectors and their cross product determine its axes or orientation. The scalars determine its dimensions or size. • How to represent each quadric surfaces? • point vectors scalars • Ellipsoid • Hyperboloid • of one sheet • Hyperboloid • of two sheets • Elliptic paraboloid • Hyperbolic paraboloid • Elliptic cone • Sphere • Right circular cylinder • Right circular cone
Let's consider a surface patches S which has boundary curves Cs0,Cs1,C0t ,C1t, and coner points P00, P10, P01, P11, as shown in the following picture. • There are infinite many surfaces S for given coner points and/or boundary curves. We have to specify the way to construct the unknown information such as the interior of the surface. Different ways of constructing the unknown parts produce different surfaces. Notice that we need two parameters for surfaces S(s,t) and one parameter for curves Cs0(t), Cs1(t),C0t(s) and C1t(s). p11 Cs1 p01 C0t S C1t p00 Cs0 p10
Surfaces • Surfaces of revolution • Sweep surfaces • Parametric surfaces • Quadric surfaces • Bilinear surface • Ruled surface • Linear Coons surface • Coons bicubic surface • Bezier surface • B-spline surface • Rational B-spline surface
Bilinear Surfaces • A bilinear surface is constructed from the four corner points of the unit square in parametric space. Any point in the interior of the surface is specified by linearly interpolating between opposite boundaries of the unit square domain. • The linear interpolation between the points P00 and P10 is: • Cs0(s) = S(s,0) = sP10+(1-s)P00 • The linear interpolation between the points P01 and P11 is: • Cs1(s) = S(s,1)=sP11+(1-s)P01 • So, the surface S(s,t) can be generate by: p11 p01 S t • (1,1) p00 (0,1) p10 s (0,0) (1,0)
In matrix form: • S(s,t) = [ ][ ][ ] • Verify that S(i,j)=Pij for i,j {0,1} . • Example: • (1) Draw the picture for the bilinear surface whose coner points are P00=(0,0,0), P10=(0,1,1), P01=(1,0,1) and P11=(1,1,0). • (2) Determine the point on the bilinear surface corresponding to s=t=1/2 in parametric space. • (3) What kind of the surface it is? Y X Z
Y X Z • Example: Derive the bilinear surface patch for the hyperboloid paraboloid: • z=(x2/a2)-(y2/b2), -a<=x<=a and -b<=y<= b
Surfaces • Surfaces of revolution • Sweep surfaces • Parametric surfaces • Quadric surfaces • Bilinear surface • Ruled surface • Linear Coons surface • Coons bicubic surface • Bezier surface • B-spline surface • Rational B-spline surface
Ruled Surfaces • A ruled surface is obtained by linearly interpolating between two known boundary curves associated with the opposite side of the unit square in parametric space. • Let Cs0 and Cs1 are two known boundary curves and S(s,0)=Cs0(s),S(s,1)=Cs1(s), the ruled surface is given by: • S(s,t) = (1-t)Cs0(s)+tCs1(s) • or S(s,t) = [1-t t][ ] • Alternatively, the curves C0t and C1t are known and S(0,t)=C0t(t), S(1,t)=C1t(t), the ruled surface is given by: • S(s,t) = • or S(s,t) = [ ][ ]
Example: You are hired by a company and your first assignment has to design a basket which has a square bottom with a circular top. Can you design this basket for the company? • Notice how the bottom square, which contains cusps, is smoothly blended into the continuous top circle. Y X (r,0,0) (l,0,h) Z
Example: you are fired by the basket company and find a new job for an airplane company. The manager think you are experienced designer and ask you to design the shape for aircraft wings. How to do it?
Surfaces • Surfaces of revolution • Sweep surfaces • Parametric surfaces • Quadric surfaces • Bilinear surface • Ruled surface • Linear Coons surface • Coons bicubic surface • Bezier surface • B-spline surface • Rational B-spline surface
Linear Coons Surface • If the four boundary curves Cs0,Cs1,C0t and C1t are known, a linear coons surface is obtained by bilinear interpolate the interior of the surface patch. • Let the surface be defined by: • S(s,t) = (1-t)Cs0(s)+tCs1(s)+(1-s)C0t(t)+sC1t(t) • Let's check the boundary curves S(s,0) and the corner point S(0,0) of the surface S: • S(s,0) = • S(0,0) = • What is wrong with the surface? • We have to modify the definition to satisfied the following condition: • for i,j in {0,1}, S(i,j) = Pij and • S(s,j) = Csj(s) and S(i,t) = Cit(t) • So, the correct definition for linear Coons surface is: • S(s,t) =
In matrix form, the surface is defined by: • S(s,t) = • or more compactly as: • S(s,t) = • The functions (1-t),t,(1-s), and s are called blending functions because they blend the boundary curves to produce the internal shape of the surface. The linear Coons surface is the simplest of the Coons surfaces. A more general Coons surface will be discussed in the future.
Example: Find the point on a linear Coons surface at s=t=0.5 when the four boundary curves are given by open third-order (k=3) B-spline curves defined by: (Points for each B-spline curves are in order). • Cs0: [0 0 0] [1 1 0] [2 1 0] [3 0 0] [3 0 3] • Cs1: [0 0 3] [1 1 3] [2 1 3] [2 1 3] • C0t: [0 0 3] [0 1 2] [0 1 1] [0 0 0] • C1t: [3 0 3] [3 1 2] [3 1 2] [3 1 1] [3 0 0] • Fig 6-30 • from Rogers
Surfaces • Surfaces of revolution • Sweep surfaces • Parametric surfaces • Quadric surfaces • Bilinear surface • Ruled surface • Linear Coons surface • Coons bicubic surface • Bezier surface • B-spline surface • Rational B-spline surface
Coons Bicubic Surface • The reason to use the Coons bicubic surface --- flexibility. • The Coons bicubic surface patch uses normalize cubic splines for all four boundary curves. Cubic blending functions are used to define the interior of the patch. p11 Cs1(s) p01 C0t(t) S(s,t) C1t(t) p00 Cs0(s) p10
Thus, the four boundary curves are: • S(s,0) = Cs0(s) = [S][N][ ]T • S(s,1) = Cs1(s) = [S][N][ ]T • S(0,t) = C0t(t) = [ ][N]T[T]T • S(1,t) = C1t(t) = [ ][N]T[T]T • where • [S] = [s3 s2 s 1], [T] = [t3 t2 t 1] • 2 -2 1 1 • [N] = -3 3 -2 -1 • 0 0 1 0 • 1 0 0 0 • The cubic blending function used for both parametric directions is: • [F] = [F1(s) F2(s) F3(s) F4(s)] • = [S] [N] • or • [F]T = [F1(t) F2(t) F3(t) F4(t)]T • = [N]T[T]T
The definition for a Coons bicubic patch is: • S(s,t) = [F1(s) F2(s) F3(s) F4(s)][Pc] • [F1(t) F2(t) F3(t) F4(t)]T • = [S][N][Pc][N]T[T]T • where • [Pc] = • What informations does the [P] matrix contains?
The parametric derivative at any point on a bicubic surface are obtained by: • Ss(s,t) = [S'][N][Pc][N]T[T]T • St(s,t) = [S][N][Pc][N]T[T']T • Sst(s,t) = [S'][N][Pc][N]T[T']T • Sss(s,t) = [S''][N][Pc][N]T[T]T • Stt(s,t) = [S][N][Pc][N]T[T'']T • where [S'] = [ ], [S''] = [ ] • [T'] = [ ], [T''] = [ ] • How to find the normal of the bicubic surface? • One of the difficulities in using bicubic surface patches is the disparate magnitudes of position, tangent and twist vectors.
Example: The Coons bicubic surface S has the following geometric information: • (1) position vectors • P00=[-100 0 100] P01=[ -100 -100 -100] • P10=[100 -100 100] P11=[100 0 -100] • (2) tangent vectors • Cs0s(0)=[100 100 0] Cs0s(1)=[1 1 0] • Cs1s(0)=[1 -1 0] Cs1s(1)=[1 -1 0] • C0tt(0)=[0 10 -10] C0tt(1)=[0 -1 -1] • C1tt(0)=[0 1 -1] C1tt(1)=[0 -1 -1] • (3) twist vectors • Sst(0,0)=[0 0 0] Sst(0,1)=[0.1 0.1 0.1] • Sst(1,0)=[0.1 -0.1 -0.1] Sst(1,1)=[0 0 0] • Find the normal vector at s=t=1/2.
Surfaces • Surfaces of revolution • Sweep surfaces • Parametric surfaces • Quadric surfaces • Bilinear surface • Ruled surface • Linear Coons surface • Coons bicubic surface • Bezier surface • B-spline surface • Rational B-spline surface