Download
1 / 17
180 likes | 416 Vues
M.I.A Daniel Alejandro García López. Algoritmos de Dibujo de Líneas. Algoritmo de dibujo de líneas. Un segmento de línea recta dentro de una escena esta definido por las coordenadas de los dos extremos del segmento. Digitalizar la línea para obtener un conjunto de posiciones enteras discretas

E N D
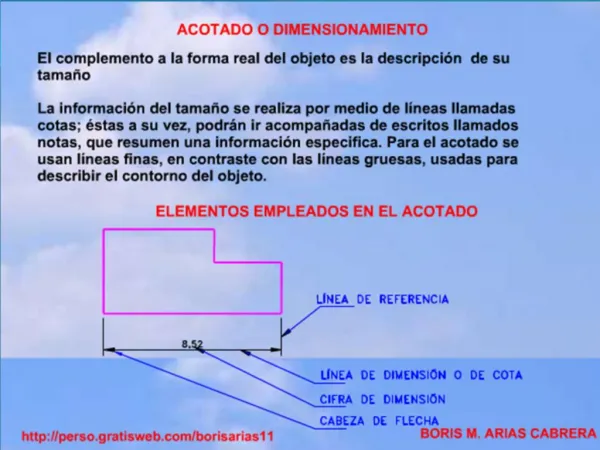
M.I.A Daniel Alejandro García López Algoritmos de Dibujo de Líneas
Algoritmo de dibujo de líneas • Un segmento de línea recta dentro de una escena esta definido por las coordenadas de los dos extremos del segmento. • Digitalizar la línea para obtener un conjunto de posiciones enteras discretas • Así una posición de línea calculada como (10.48, 20,51) se convierte en la posición del píxel (10,21)
Ecuaciones de las líneas • Para determinar las posiciones de los píxeles a lo largo del un trayecto de línea recta se utilizan las propiedades geométricas de la línea. • La ecuación punto-pendiente cartesiana • Y=m.x+b (m])pendiente (b) intersección en y • M=(y-y0)/(x-x0) • B=y0-m.x0
Para cualquier intervalo horizontal ãx correspondiente a un ãy especificado mediante la formula: ãx=ãy/m
Algoritmo de Análisis diferencial digital • Basado en calcular ãy o ãx: las líneas se muestrean a intervalos unitarios según una de las coordenadas y los correspondientes valores enteros más próximos al trayecto lineal se calculan para la otra coordenada. • Si m<=1 podemos muestrear a intervalos unitarios según el eje de las x(ãx=1) y calculamos los valores sucesivos de y como: yk+1=yk+m
El subíndice k adopta valores enteros comenzando en 0 para el primer punto e incrementándose en una unidad cada vez hasta alcanzar el extremo de la línea • Si m>1.5 invertimos los papeles x e y, es decir muestreamos a intervalos unitarios de y y calculamos los valores de x consecutivos mediante xk+1=xk+(1/m)
en este caso, cada valor de x calculado se redondea a la posición del píxel más cercana en la línea de exploración actual. • Si las líneas deben procesarse desde el extremo situado más a la izquierda hasta el extremo situado más a la derecha utilizamos • Yk+1=yk-m xk+1=xk-(1/m)
Desventajas • Requiere aritmética de punto flotante, la que es mas lenta y costosa. • Es inapropiado para implementar por hardware • El redondeo es una operación real adicional • Las líneas largas pueden verse afectada por errores de redondeo en m.
Algoritmo de Análisis diferencial digital • Camina a lo largo del eje x desde x0 hasta x1 • Para cada valor xi se calcula Yi y lo redondea al píxel mas próximo • El calculo de Yi+1=Yi +m lo que equivale a incrementar a X en 1 • Sustituyendo las coordenadas en los extremos • Yi=m*xi +B • Yi+1=m*(xi +1) +B
Algoritmo de Análisis diferencial digital • Simplificando • Yi+1 =yi + m
Extensión por simetría Dy<0 A Dx<0 B Abs(Dy)/Abs(Dx)>1 C
Algoritmo de Bresenham • Preciso y eficiente • Utiliza sólo cálculos enteros para determinar los incrementos • El algoritmo comprueba un signo de un parámetro entero cuyo valor es proporcional a la diferencia entre las separaciones verticales de las dos posiciones del píxel con respecto a la trayectoria lineal
Algoritmo de Bresenham • 1. Introducir los dos extremos de la línea y almacenar el extremo izquierdo • 2. Configurar el color para la posición del búfer de la imagen, es decir dibujar el primer punto • 3. calcular las constantes ⌂x,⌂y,2⌂y y 2⌂y-2⌂x, y obtener el valor inicial del parámetro de decisión que será p0=2⌂y-⌂x • 4. Para cada xk a lo largo de la línea, comenzando en k=0, realizar la siguiente comprobación. Si pk<0, el siguiente punto que hay que dibujar será (xk +1,yk) y
Pk+1=pk +2⌂y • En caso contrario, el siguiente punto que habrá que dibujar es (xk+1,yk +1) y pk+1=pk +2⌂y -2⌂x • 5. Realizar el paso 4, ⌂x -1 veces
Ejemplo • Digitalizar la línea definida por los vértices (20,10) y (30,18) • Pendiente =8/10 • ⌂x=10, ⌂y=8 • 2⌂y=16, 2⌂y-2⌂x=-4
Intdx=fabs(xEnd-x0), dy=fabs(yEnd-Y0); • Int p=2*dy –dx • InttwoDy=2*dy, twoDyMinusDx=2*(dy-dx); • Intx,y; • If(x0>xEnd){ • X=xEnd • Y=yEnd; • xEnd=x0; • }
Else{ • X=x0; • Y=y0; • } • setPixel(x,y); • While(x<xEnd){ • X++; • If(p<0) • P+=twoDy; • Else{ • Y++; • P+=twoDyMinusDx • } • setPixel(x,y); • }