Download
1 / 50
510 likes | 764 Vues
CPG-based LOCOMOTION. Robotics Course. Lesson 23. Legged Robot Locomotion Control. Legged Robot Locomotion Control CPG-and-reflex based Control of Locomotion. Locust Behavior. Leg Coordination: A number of local rules suffice for different gaits like tripod or tetrapod to emerge.

E N D
CPG-based LOCOMOTION • Robotics Course Lesson 23
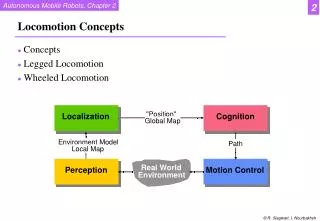
Legged Robot Locomotion Control • Legged Robot Locomotion Control • CPG-and-reflex based Control of Locomotion
Locust Behavior • Leg Coordination: A number of local rules suffice for different gaits like tripod or tetrapod to emerge. • Quasi-rhythmic movement of the leg: is controlled by a modular system exploiting the loop through the world. A central oscillator is not necessary. • Control of stance is extremely simplified by application of a combination of negative and positive feedback at the joint level. • This is possible because physics are exploited instead of explicit calculation of a body model. • The system is not only „intelligent“ in terms of its behavioral properties, but also in terms of simplicity of construction.
CPG Fundamentals • Supraspinal structures are not necessary for producing the basic motor pattern for stepping. • The basic rhythmicity of stepping is produced by neuronal circuits contained entirely within the spinal cord. • The spinal circuits can be activated by tonic descending signals from the brain. • The spinal pattern-generating networks do not require sensory input but nevertheless are strongly regulated by input from limb proprioceptors.
Neuromechanical simulation • Two-dimensional biomechanical model: articulated rigid body with spring-and-damper muscles A model of the body is essential for understanding locomotion control
Questions • Is a genetic algorithm a useful tool for designing neural network simulations of the lamprey’s locomotor circuit? Automatic setting of network parameters • How is traveling wave affected by the intersegmental coupling? • How is sensory feedback integrated into the CPG for swimming in non-stationary conditions? • How is the CPG activity affected by rapidly varying locomotion control
Fitness functions & evolved parameters • Incremental evolution: first segmental oscillator, then intersegmental couplings, finally sensory feedback • Parameters which are evolved: • Synaptic weights • The fitness functions reward: • Stable oscillations • Variable frequencies (pattern modulation) • Optimized speed of locomotion • The general layout of the neural network is otherwise fixed
Example of different stages in an evolutionary run Generations
The Problems of legged locomotion control • Coordinating all the degrees-of-freedom of the robot: finding the right frequency = 1/T, phase, amplitude A and signal shape
The Problems of legged locomotion control • Underactuated problem: a robot cannot follow arbitrary motion commands • Requirements: • Take advante of the robot's dynamics • Coordinate multiple degrees of freedom • Keep balance • Modify the gait for different speed and directions • Obstacle avoidance • Visually-guided feet placements • Adapting to perturbations
Different types of Gaits • Hexapod locomotion: tripod gait, metachronal wave Quadruped locomotion: walk, trot, gallop/bound, pace Biped locomotion: walk (at least one leg on the ground at all times), running
Statically versus dynamically stable gaits • Statically stable gait: the center of mass is maintained at all times above the support polygon formed by the contacts between the limbs and the ground Dynamically stable gait: the center of mass is maintained over the support area only in average
Minimal ingredients for locomotion control • A trajectory planner • To produce the different trajectories that each degree of freedom (DOF) has to follow • Trajectory = set of joint angles over the times • A PID-controller • To produce the torques (in the motors) necessary to follow a specific trajectory
CPG-and-reflex based Control of Locomotion • Legged Robot Locomotion Control • CPG-and-reflex based Control of Locomotion
CPG-and-reflex control • Main idea: use oscillators and replicate the distribute control mechanisms found in vertebrates
Concept of Limit Cycle • A limit cycle is an oscillatory regime in a dynamical system: If the limit cycle is stable, the states of the system will return to it after perturbations
CPG-and-reflex control • Two types of implementations: • CPG produces desired positions • CPG directly produces torques
Taga's neuromechanical simulation • G. Taga. Emergence of bipedal locomotion through entrainment among the neuro-musculo-skeletal system and the environment. Physica D: Nonlinear Phenomena. 75(1-3):190-208, 1994 • G. Taga. A model of the neuro-musculo-skeletal system for human locomotion. I. Emergence of basic gait. Biological Cybernetics, 73(2):97:111, 1995.
Taga's neuromechanical simulation • Neural oscillator:(Taga 1994)
Taga's neuromechanical simulation • Walking gait:
Taga's neuromechanical simulation • Interesting aspects: • Locomotion seen as a limit cycle due to the global entrainment between the neuro-musculo-skeletal system and the environment • Robustness against (small) variations in the environment (e.g. small slopes • Cons • Hand-tuning of (many) parameters to obtain satisfactory limit cycles
Nonlinear oscillators • Example: Design a locomotion controller inspired by the salamander CPG for the control of an amphibious robot Lamprey Salamander
Nonlinear oscillator model • Each oscillatory center is modeled with the following oscillator • Limit cycle: explicit frequency and amplitude parameters Limit Cycle
Inter-oscillator coupling • Two parameters aij and bij per coupling
Body CPG • Model: 40 segments • Assumptions: • Lamprey-like system: chain of oscillators; • Two oscillators per segment • Closest neighbour coupling • Double symmetry: • Left-right per segment 6 open coupling parameters
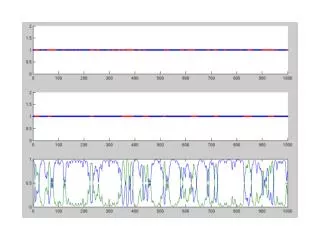
Generation of traveling waves for swimming Example: • Devolvé et. al. (1997) • EMG • In axial • musculature
Corresponding swimming gait Motoneuron signals: mi = max(xi, 0)
Complete CPG • Limb CPG Body CPG
Generation of standing wave for walking • swimming EMG
The salamander model The strength: We need not have knowledge of the biology to define a fitness function that gives rise to efficient and robust locomotion. A fitness function that rewards fast forward motion might suffice. The weakness: If we wanted to model a real salamander, we are in for a disappointment. The neural network that evolved bares little resemblance to the biological one.
What does it do? The salamander can: • Walk • Swim • Switch between walking & swimming across a border • Switch to swimming if it falls into the water • Follow targets, turn, modulate speed, and more...
Biological motor behaviour Central Pattern Generating Neural Networks (CPGs): Small, relatively simple neural systems with well-defined units, well-defined circuitry, and well-defined function Brain control Central Pattern Generators Muscles Such central pattern generators are believed to be responsible for practically all known muscle behaviour.
CPG Motor Schema In “simple” motor systems (insects, molluscs, crustacea), central pattern generators have identical architectures in all animals of the same species. They are typically distributed throughout the body and form a distributed coordinated network of activity. They also receive high level instructions from the brain and feedback from the low-level muscles. The salamander model, while it is ‘high level’ its fitness function, is based on a simulation of CPGs and muscles.
Outcomes • Simple control signals for controlling the speed, direction and type of gait (abody_left, abody_right, alimb_left, alimb_right and ) • Robustness against noise and perturbations • Entrainment between the CPG and the body through sensory feedback • Nonlinear oscillators are more tractable then neural networks (fewer parameters) • Problems: not yet a good methodology for setting the coupling weights
Quadruped-robot controlled with a CPG-and-reflex based controller Kimura Lab. National Univ. of Electro-Communications Tokyo
CPG-and-reflex Control: summary • Pros: • Distributed control • Limit cycle behavior (controller-body-environment) • Robust against perturbations • Smooth trajectories due to the oscillators • Cons: • Fewer mathematical tools than other methods • Not (yet) a clear design methodology, it is recommended to use learning algorithms