Download
1 / 9
90 likes | 183 Vues
Team E.B.4.H. Lil Woody. Team Members. Remy Devoe Jordan Sprouse Jeff Dix Ryan Beeler. Device Design.

E N D
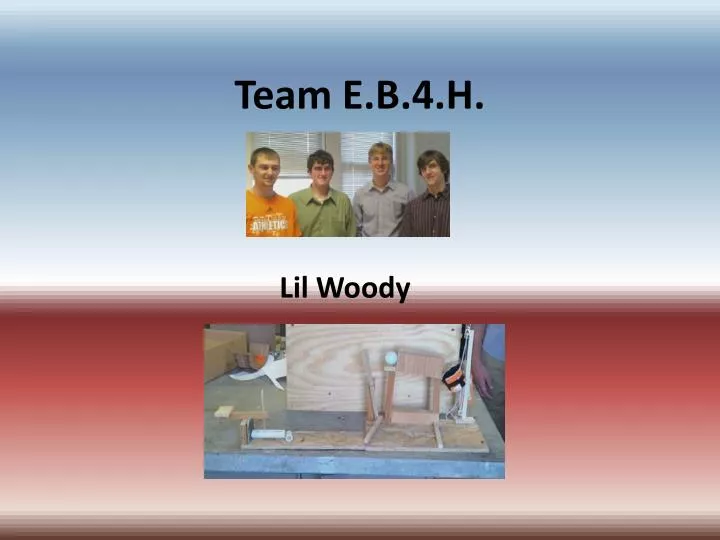
Team E.B.4.H. Lil Woody
Team Members • Remy Devoe • Jordan Sprouse • Jeff Dix • Ryan Beeler
Device Design • Our device is of simple design. It is small and made primarily of wood, thus comes the name Lil Woody. With the exception of two pieces of pipe, a spring, two pulleys, a golf ball, and a flag. • It operates in a short period of time and completes each step accurately and with precision.
Device Overview • Our device starts with a preloaded spring compressed by a lever arm. Once the spring is released it pushes an object into a system of lever arms. The final lever arm collides with a golf ball which rolls down a ramp into a basket causing the flag to raise and start the next group’s device.
Device Calculations • k = .048 “k is spring constant in kg-in” • x = 4.5 “x is in inches” • m = .01 “m is in kg” • e_pot = .5.*k.*x.^2 “e_pot is elastic potential of spring” • vel = sqrt(e_pot./m) “velocity of hollow cylinder” • a_tan = vel.^2./20 “acceleration of hollow cylinder” • f1 = m.*a_tan“force on impact with lever arms” • r = 4 “r equals distance from pivot to where force is applied” • t1 = r.*f1 “torque of first lever arm” • r2 = 5 “torque of second lever arm r2 is distance from rotation on second lever” • t2 = f1.*r2;
Device Calculations (continued) • F1 remains constant through lever arms with no friction or energy loss • mb equals mass of ball in kg Win equals work done on ball by lever • mb = .46; h = 1 in • Win = f1.*2; “2 inch distance between lever and ball” • g = 32.2.*12 “gravity in inches per second squared” • Vel_b = sqrt((6.*mb.*g.*h + Win)./(mb.*5)) “velocity of ball after reaches bottom of incline” • “Basket and flag are balanced on pulley system. No gravitational potential energy affects the system until ball enters basket.” • h2 = 7; “height from edge of ramp to where basket hits ground” • vel_basket = sqrt((5./6).*2.*velb.^2 + g.*h2);
Construction Issues • Our main problem was with trying to nail the small pieces of wood together. The wood is small and splintered easily. Instead we used hot glue. • During the construction of our vertical lever arm the ramp fell apart. • We had great difficulty in trying to attach the flag to the string. So we punched holes in the flag and tied it on.
Problems Continued • While attaching the flag for the second time our string broke and we didn’t have any more string to replace it. We got more string and repaired the problem quickly.
Conclusions • Overall our project was a success. We were able to construct it quickly and it is able to perform consistently.