Download
1 / 13
170 likes | 838 Vues
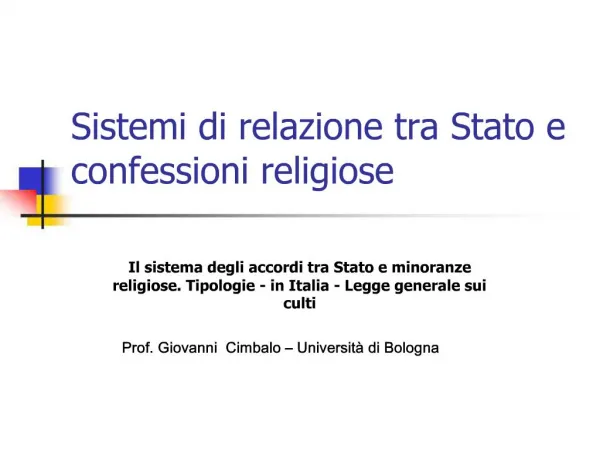
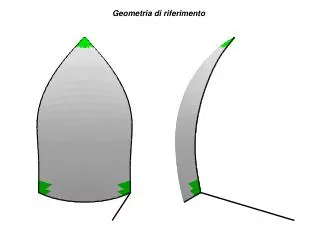
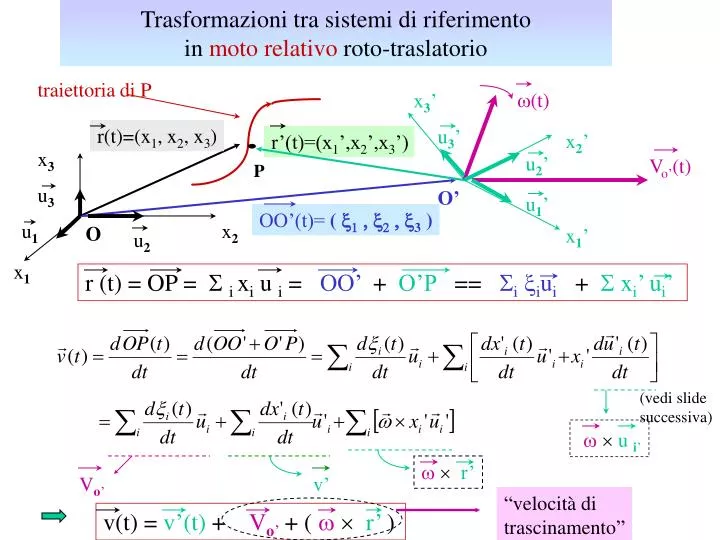
Trasformazioni tra sistemi di riferimento in moto relativo roto-traslatorio. traiettoria di P. w (t). x 3 ’. r(t)=(x 1 , x 2 , x 3 ). u 3 ’. x 2 ’. r’(t)=(x 1 ’,x 2 ’,x 3 ’). x 3. u 2 ’. V o’ (t). P. u 3. O’. u 1 ’. OO’(t)= ( x 1 , x 2 , x 3 ). u 1. x 2. O. x 1 ’. u 2.

E N D
Trasformazioni tra sistemi di riferimento in moto relativo roto-traslatorio traiettoria di P w(t) x3’ r(t)=(x1, x2, x3) u3’ x2’ r’(t)=(x1’,x2’,x3’) x3 u2’ Vo’(t) P u3 O’ u1’ OO’(t)= ( x1 , x2 , x3 ) u1 x2 O x1’ u2 x1 r (t) = OP =Si xi u i= OO’+ O’P==Sixiui+S xi’ ui’ (vedi slide successiva) w ´u i’ w ´r’ Vo’ v’ “velocità di trascinamento” v(t)=v’(t)+ Vo’+ (w ´r’)
Moto di “precessione” di un vettore : Rotazione del vettore intorno ad un asse, con velocità angolare di rotazione : w J dJ Vale laformula di Poisson: dA j A Infatti: Þ Inoltre dA ^ A, w e il suo verso coincide con quello di Per un sistema di riferimento in rotazione con velocità angolare w, ciascuno dei versori dei suoi assi coordinati compie un moto di precessione : Þ
Vo’ Esempio: velocità ditrascinamento nel moto della Terra Sole vtr = Vo’+ w r’ Velocità rispetto al Sole di un punto P fermo sulla superficie della Terra z’ w Vo’ P w ´r’ r’(t) y’ O’ z x’ OO’(t) y x O
Riepilogo: trasformazioni di velocità ed accelerazione tra sistemi di riferimento in moto relativo: Sistema “assoluto”: Sistema “relativo”: v’, a’ v, a v= v’ +vtr= v’ + VO’ + w ´ r’ a= a’ +atr + aCo vtr = VO’ + w ´ r’ “velocità di trascinamento” “accelerazione di trascinamento” a Co= 2 w ´ v’ “accelerazione complementare” o “di Coriolis”
Esempio di trasformazione delle accelerazioni : il moto della Terra w= costante w ´ ( w ´ r’ ) w N P vO’ r’ aO’ (verso il Sole) O’ S piano dell’eclittica Accelerazione di trascinamento: distanza Terra-Sole N P l raggio della Terra latitudine All’equatore: S
Esempio: accelerazione di gravità ( w = costante, aO’ trascurabile ) g0= g+w ´ (w ´r ) + 2 w ´ v’ accelerazione relativa accelerazione assoluta Accelerazione osservata in un sistema solidale con la Terra: g = g0-w ´ (w ´r ) - 2 w ´ v’ z (Alto) la componente verticale gz dell’accelerazione di gravità osservata g aumenta con la latitudine ( è minima all’Equatore; al polo coincide con g0 ) g w go r - w ´ (w ´ r ) w ´ r y(Est) x (Sud)
w A (alta pressione) v’ Effetti dell’ accelerazione di Coriolis: B (bassa pressione) -2( w x v’) Nell’ emisfero settentrionale (meridionale) i vortici ciclonici atmosferici ruotano in senso antiorario (orario) vortice ciclonico
Rotazione apparente del piano di oscillazione del “pendolo di Faucault” Pendolo di Faucault w N w v’ E -2 w´ v’ Est piano di oscillazione v’ rotazione apparente del piano di oscillazione -2 w´ v’ Nell’esperienza di Faucault ( Parigi, Pantheon,1850):
Sistemi di riferimento in moto relativo puramente traslatorio ed uniforme : Trasformazioni galileiane VO’ = costante z’ aO’ = 0, w = 0 z vO’ y’ O’ x’ O y x “Trasformazioni galileiane”: le accelerazioni sonoinvarianti per trasformazioni galileiane Nota : le trasformazioni galileiane, che postulano un tempo “assoluto”, contraddicono il principio di invarianza della velocità della luce (sperimentalmente osservato). [ Per trattare correttamente velocità relative prossime alla velocità della luce, è necessario utilizzare le trasformazioni della meccanica relativistica (trasformazioni di Lorentz ) ]
Scegliendo uno degli assi coordinati parallelo alla velocità relativa di traslazione : x, x ’ // vO’ Trasformazioni galileiane P r z r’ z’ vO’ O x x’ O’ y y’
Forze apparenti in un sistema di riferimento non inerziale: Sistemi non inerziali P traiettoria di P w(t) a Vo’(t) F=ma O’ O Sistema non inerziale: Sistema inerziale: equazione formalmente uguale alla legge di Newton Þ avendo definito la “forza”: forza reale “forza fittizia” (ad es., forza centrifuga)
Esempio di forza apparente: “forza centrifuga” su una piattaforma rotante w F m r Equilibrio sulla piattaforma: la forza reale : equilibra la forza “centrifuga”: Il sistema non è un sistema inerziale (in esso non vale la legge di Newton) : F a’=0