Download
1 / 40
410 likes | 541 Vues
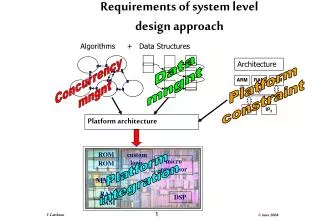
Requirements and Conceptual Design of M3 System. Ben Platt Myung Cho Mark Sirota 14 September. Outline. Ben Platt Overview and System Requirements Myung Cho Modeling Conceptual Mirror Support Design Mark Sirota M3S Control Systems Overview.

E N D
Requirements and Conceptual Design of M3 System Ben Platt Myung Cho Mark Sirota 14 September
Outline • Ben Platt • Overview and System Requirements • Myung Cho • Modeling Conceptual Mirror Support Design • Mark Sirota • M3S Control Systems Overview
Tertiary Mirror System (M3S) Overview and System Requirements Ben Platt 14 September 2007
Outline • M3 System Decomposition • External Interfaces • M3S Overview • External Interfaces • M3 System Requirements
M3 System Decomposition • M3 System (M3S) • M3 Cell Assembly (M3CA) • M3 Mirror (M3M) {blank and polishing} • M3 Supports (M3SS) {actuators, load cells, cabling} • M3 Cell (M3C) {cell structure, trunnions} • M3 Control System - Cell (M3CSC) {electronics, software, sensors} • M3 Positioner Assembly (M3PA) • M3 Rotator (M3R) {Rotator Structure, Rotator Drive(s), Rotator Bearing, Countermass} • M3 Tilt Mechanism (M3T) {Tilt Structure, Tilt Actuator, Tilt Bearings} • M3 Cable Wrap (M3CW) • M3 Control System - Positioner (M3CSP) {electronics, software, sensors} • M3 Interface Panel (M3I) {electrical/fluid interface with Telescope Structure}
Enclosure Crane Dimension and Clearances Summit Facilities (TMT.FAC.INF.SUM) Structure (TMT.TEL.STR) M1 (TMT.OPT.M1) ICD-SUM-M3 ICD-M1-M3 ICD-STR-M3 Power, Lighting, and Grounding (TMT.TEL.CONT.POWR) Optical Cleaning Systems (TMT.TEL.OPT.CLN) ICD-M3-POWR ICD-M3-CLN M3 (TMT.TEL.OPT.M3) Engineering Sensors (TMT.TEL.CONT.ESEN) ICD-M3-ESEN ICD-M3-COAT Optical Coating System (TMT.TEL.OPT.COAT) ICD-M3-TSS ICD-M3-TINS Telescope Safety System (TMT.TEL.CONT.TSS ) Test Instruments (TMT.TEL.OPT.TINS) ICD-M3-TCS ICD-M3-HNDL Telescope Control System (TMT.TEL.CONT.TCS) Optics Handling Equipment (TMT.TEL.OPT.HNDL) M3S External Interfaces Draft copies of the ICDs will be made available for this study.
M2CA M2PA M3S Top Level Requirements • Provide 2 DOF articulation for alignment & to steer beam onto instrument • Provide rapid slew of M2 Mirror to switch beam between instruments • Provide smooth tracking to maintain beam on instrument, during observing • Maintain M3 Mirror figure in the face of changes in gravitational and temperature fields
M3 Cell Assembly (M3CA) • The M3CA consist of the Cell, Mirror and Mirror Support System. M3CA
M3 Mirror Blank Requirements • Mirror Material: • low expansion glass or grass ceramic flat mirror • M3 configuration: • Flat solid elliptical mirror, CA = 3.470 m X 2.454 m • Blank Shape: • Plano – Plano
M3M - Polish • All figure requirements are with the mirror in the M3CA. • The figure requirement is completely described with a normalized Structure Function based on a Kolmogorov atmosphere, with tip/tilt removed.
Where: Where: D(x) is the structure function and is in units of (nm)2 A = Leading coefficient = 211015 B = High frequency errors (surface roughness) = 2 nm x = Separation between point pairs, similar to spatial frequency. d = Diameter of beam footprint = 1.33 m r0 = Fried’s parameter = 3.66 m M3S Structure Function Over any beam footprint d = 1.33m
Figure Parameters Derived from Structure Function • Parameters derived from Structure Function • RMS WFE = 168 nm • Surface Slope Error: • P-V = 1.69 µrad • RMS = 0.47 µrad
M3 Cell (M3C) • The tertiary mirror cell supports the M3M and M3SS. It also provides a reaction base for the active mirror supports. • Supports weight of mirror and mirror supports in any orientation of the telescope. • Functions as handling device for the tertiary mirror. • Stiffness shall be sufficient to support a M3S first resonant frequency of > 12 Hz.
M3 Support System (M3SS)Performance Prediction of NAOA Conceptual Design Myung Cho
Y X Conceptual Design Parameters • Mirror • Flat solid elliptical mirror • Mirror thickness: 100 mm • Mirror mass: 2000 kg or less • Mirror support system • Elliptical patterns (hexa-polar) • Tri-axial support concept • 60 Axial support (passive/active), • 60 Lateral support (passive in X &Y) • Mirror substrate chosen to be solid flat 100 mm thick, to produce smooth print-through bumps that can be corrected by adaptive optics 60 hexa-polar support pattern
M3 Support Concepts (Tri-axial ) • M3 Support concept design (presented at M3 CoDR) with • Tri-axial support units that apply force vectors that intersect at the mid-plane of the mirror • These were linked by hydraulic whiffle trees into six sectors that provide support and definition in six DOF’s load cell
Axial support performance(mirror face up; gravity in local Z) Nominal support location (radial position): R1: 17% R2: 40% R3: 63% R4: 86% Support print-through in Z: • P-V surface: 58 nm • RMS surface: 11 nm (entire surface) • Axial support in 2 groups: 218~220 N on R1 (inner most) 276~306 N on R2-R4 (note) support forces in each group are not the same Support print-through Support forces
M3 Lateral Support Gravity Gravity Surface error: gravity in -Y direction 9 nm P-V 1 nm RMS Surface error: gravity in X direction 8 nm P-V 1 nm RMS
M3 Dynamic Performance Natural frequencies and mode shapes (free-free)* *First 10 mirror bending mode shapes are similar to low order Zernike polynomials Mirror mass = 1750 Kg in the model
Active support performance • M3 active supports can correct low order aberrations • First 10 mirror bending modes (natural modes) were modeled noise-free for a perfect systemto determine • Residual RMS surface error from Reference surface RMS of 1000 nm • Maximum actuator force to correct Reference surface • Gain (Reference RMS ÷ residual RMS) RMS based on the entire optical surface
M3 Control System – Cell (M3CSC) Mark Sirota
M3 Control System-Cell • Summary Description & Requirements • The M3 Control System–Cell (M3CSC) provides local control for the M3 Cell Assembly (M3CA). • The M3CSC is independent and separate from the M3 Control System-Positioner (M3CSP). • The primary external M3CSC control interface is with the Telescope Control System (TCS) via a single Ethernet connection. • The M3CSC will meet all performance requirements over the following conditions. • Zenith angles between 0 and 65 degrees • Zenith angle rates up to 30 arcseconds/seconds • Temperatures between 2 and 15 degrees C • The M3CSC will be capable of maintaining the M3 mirror figure without requiring zenith angle or temperature data from the TCS at rates any faster than once every 100 seconds.
M3 Control System-Cell • Summary Description & Requirements • The M3 Mirror shape will settle to its final shape within 15 seconds of any change of Zenith Angle between 0 and 65 degrees. • “Cell Control” look up table (LUT) • Contains the set-points for each force actuator as a function of zenith angle and temperature. • The values contained in the Cell Control LUT are provided by the TCS. • Initial values for the Cell Control LUT will be developed during optical lab testing and supplied by the M3CA vendor. • Zenith angle and temperature are provided to the M3CSC by the TCS at a constant rate of ~ 0.1 Hz. • The M3CA won’t require complete calibration of the Cell Control LUT more frequently than once per year. Bias only corrections (zero point corrections) to the LUT will be allowed on a monthly time scale.
M3 Control System - Cell • Summary Description & Requirements • Calibration and Diagnostics • The M3CSC will provide a telemetry stream that consists of M3CSC parameters such as currents, sensor values, etc. • The M3CSC will include a diagnostic and calibration mode which supports • control of individual actuators and the reading of individual sensors. • support the on-sky measurement of individual actuator influence functions • The M3CSC will have the capability of receiving and executing M3 Support command offsets from the TCS at rates up to once per second. (This will be used to gather data required to build a new Cell Control LUT) • Interfaces • Control and data transmission between the TCS and M3CSC will be via a single Ethernet connection. • All control, power, utility, utility interlocks, engineering sensor, and local control interfaces are via the M3 Interface Panel. • E-Stop, Safety, and Fault Handling and Alarms
M3 Positioner Assembly (M3PA) • The Positioner will articulate the M3CA in two (2) axes. • Points the science beam coming from M2M to science instruments, located at various positions on the Nasmyth Platform. • Tracks to keep the science beam positioned properly on a given science instrument, while observing through changing telescope angles. • Slews to new target and/or instrument. • The stiffness of the positioner shall be such that when carrying the mass of the M3CA, the first resonant frequency of the M3S is > 12Hz TBC. This shall apply to all possible orientations of the telescope.
3.5 m 2.2 m 1.5 m M3PA Top Level Requirements • The tilt mechanism will provide articulation of M3M about the M3T axis, which is in the plane of the Tertiary Mirror optical surface, collinear with the minor axis of the outer elliptical profile of the M3M. • The M3 volume constraint is a 2.2 m diameter cylinder extending from the vertex of M1 a height of 1.5 m and a 3.5 m diameter cylinder extending to the top of the M3S.
M3PA Top Level Requirements • The M3 Positioner interfaces: • Telescope Structure on the lower end • M3 Cell Assembly (M3CA) on the upper end. . • A rotator bearing is located on the bottom of the Positioner to provide smooth and accurate rotation of the Tertiary Mirror. This bearing is part of the Positioner.
Rotation Tilt 30 20 10 Rotation Angle (degrees) 0 -10 0 10 20 30 40 50 60 70 M3PA Range of Motion • Tilt range: 50° +/- 8 ° • Rotation range: +/- 180 ° • Must address instruments on both Nasmyth structures • Additional range required for servicing 60 M3 Tilt Trajectories 55 50 Tilt Angle (degrees) 45 40 Zenith Angle (degrees) M3 Rotation Trajectories 0 10 20 30 40 50 60 70 Zenith Angle (degrees)
Rotator M3 Positioner – Rotator (M3R) • The M3S azimuth bearing supports the mass of the M3S in all possible orientations of the telescope. It also defines the position of the tertiary mirror (M3) with respect to rotation about the telescope optical axis. • The outer diameter of the bearing shall be 2.2 m. • The inner diameter shall allow personnel access for maintenance of the M3S. • The bearing shall be capable of supporting the mass of the M3M, M3C, M3 Support System (M3SS).
Tilt Mechanism M3 Positioner – Tilt Mechanism (M3T) • The tilt mechanism is a 1-D tilt mechanism and shall rotate about an axis in the plane of the mirror, coincident with the short axis of the ellipse and perpendicular to the optical axis of the telescope. • The M3 tilt mechanism shall have a smooth slew and tracking mode with controlled accelerations to meet the requirements stated in the M3 Control System – Positioner (M3CSP)*. *See presentation on M3CSP
M3 Cable Wrap (M3CW) • Utility lines (power, cooling, pneumatic, hydraulic (TBC)) as well as signal lines traverse the Interface between the M3PA and the telescope structure. • These lines must be routed through a cable wrap, provided on the M3S, near the Interface, to allow for rotation at this Interface without damage to the lines. • The cable wrap may go on either side of the azimuth bearing but must not block servicing access.
M3 Access • Ladder inside M3 tower • M1 floor extends to inside of M3 tower • M3 and M1 not shown for clarity in figure • hoist attachment point for lifting equipment
M3 Interface Panel • TMT will provide an interface panel for connecting all cables, wires and hoses. • The interface panel may be located on either side of the rotator bearing or in the tower.
M3 Control System – Positioner (M3CSP) Mark Sirota
M3 Control System-Positioner • Summary Description & Requirements • The M3 Control System–Positioner (M3CSP) provides local control for the M3 Positioner (M3P). • The M3CSP is independent and separate from the M3 Control System-Cell (M3CSC). • The primary external M3CSP control interface is with the Telescope Control System (TCS) via a single Ethernet connection. • The M3CSC will meet all performance requirements over the following conditions. • Zenith angles between 0 and 65 degrees • Zenith angle rates up to 30 arcseconds/seconds • Temperatures between 2 and 15 degrees C • The M3CSP will receive and execute rotation and tilt position commands from the TCS.
M3 Control System - Positioner • Summary Description & Requirements • Calibration and Diagnostics • The M3CSP will provide a telemetry stream that consists of parameters such as currents, sensor values, etc. • The M3CSP will include a diagnostic and calibration mode which supports control of individual actuators and the reading of individual sensors. • Interfaces • Control and data transmission between the TCS and M3CSP will be via a single Ethernet connection. • All control, power, utility, utility interlocks, engineering sensor, and local control interfaces are via the M3 Interface Panel. • E-Stop, Safety, Fault Handling, Alarms
M3 Control System - Positioner • Core performance characteristics • These numbers are representative and will be updated over the next several weeks.