Download
1 / 25
250 likes | 383 Vues
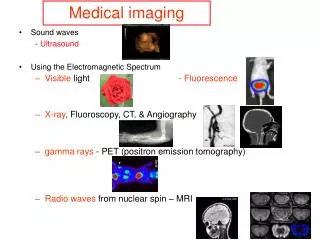
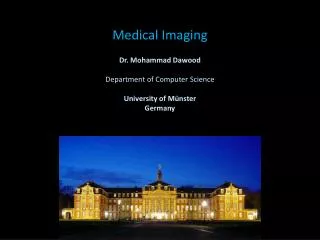
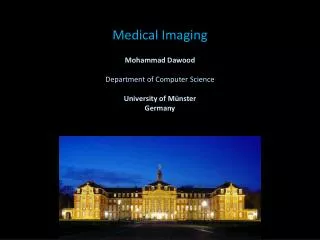
Medical Imaging. Mohammad Dawood Department of Computer Science University of Münster Germany. Image Registration. Registration T : Transformation In this lecture Floating image : The image to be registered Target image : The stationary image. Registration Linear Transformations

E N D
Medical Imaging Mohammad Dawood Department of Computer Science University of Münster Germany
Registration T : Transformation In this lecture Floating image : The image to be registered Target image : The stationary image
Registration Linear Transformations - Translation - Rotation - Scaling - Affine
Registration 3D Translation
Registration 3D Rotation
Registration 3D Scaling
Registration Rigid registration Angles are preserved Parallel lines remain parallel
Registration Affine registration
Registration Feature Points
Registration Feature Points 1. De-mean 2. Compute SVD 3. Calculate the transform
Registration Feature Points Iterative Closest Points Algorithm (ICP) 1. Associate points by the nearest neighbor criteria. 2. Estimate transformation parameters using a mean square cost function. 3. Apply registration and update parameters.
Registration Feature Points Random Sample Consensus Algorithm (RNSAC) 1. Transformation is calculated from hypothetical inliers 2. All other data are then tested against the fitted model and, if a point fits well to the model, also considered as a hypothetical inlier 3. The estimated model is reasonably good if sufficiently many points have been classified as hypothetical inliers. 4. The model is re-estimated from all assumed inliers 5. Finally, the model is evaluated by estimating the error of the inliers relative to the model
Registration Phase Correlation
Registration Distance Measures - Sum of Squared Differences (SSD) - Root Mean Square Difference (RMSD) - Normalized Cross Correlation (NXCorr) - Mutual Information (MI)
Registration Sum of Squared Differences SSD(f,t) SSD(20f,t)
Registration Root Mean Squared Differences RMS(f,t) RMS(20f,t)
Registration Normalized Cross Correlation NXCorr(f,t) NXCorr(20f,t)
Registration Mutual Information MI(f,t) MI(20f,t)
Optical flow Brightness consistency constraint With Taylor expansion V : Flow (Motion)
Optical flow Lucas Kanade Algorithm: Assume locally constant flow =>
Optical flow Horn Schunck Algorithm: Assume globally smooth flow
Optical flow Bruhn’s Non-linear Algorithm