ROTATIONAL MOTION
580 likes | 792 Vues
ROTATIONAL MOTION. Y. Edi Gunanto. Gerak Rotasi. Dalam Fisika dibedakan 2 jenis gerak benda : 1. Gerak Translasi : the motion of an object through space. (change of location) 2. Gerak Rotasi : the spinning of an object around an axis. (change of orientation).

ROTATIONAL MOTION
E N D
Presentation Transcript
ROTATIONAL MOTION Y. Edi Gunanto
Gerak Rotasi • Dalam Fisika dibedakan 2 jenis gerak benda : 1. Gerak Translasi : the motion of an object through space. (change of location) 2. Gerak Rotasi : the spinning of an object around an axis. (change of orientation)
Objects may have purely translational motion, purely rotational motion, or both. • A rigid body (benda tegar)is composed of particles in fixed positions. • In a rigid body undergoing purely rotational motion, all points of the body move in circles centered around a line called the axis of rotation.
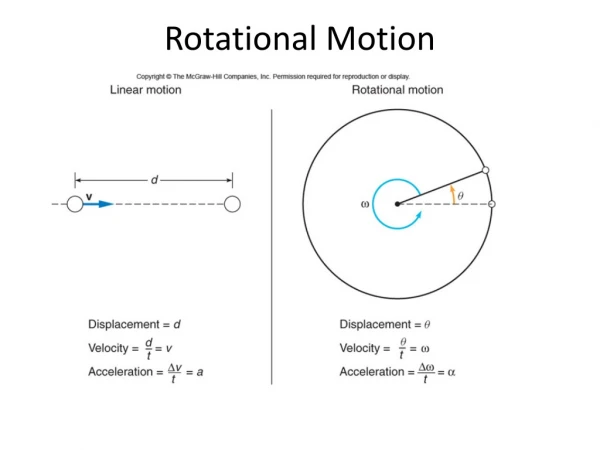
Rotational Motion Key to learning rotational motion: THE CONCEPTS FROM TRANSLATIONAL MECHANICS (E.G. VELOCITY, ACCELERATION, FORCE ENERGY, & MOMENTUM) HAVE ANALOGOUS ROTATIONAL CONCEPTS.
Rotational Kinematics Angular displacement ()is the rotational analog of displacement (∆x).
r r • Angular displacements are measured in radians. = Arc length/radius = r/r = 1 radian For one complete revolution: = 2r/r = 2 radians So, 2 rad = 360° = 1 rad
Answers 180 /2 57.3 20 Find the following: rad = ___ degrees 90° = ___ rad 1 rad = ___ degrees 10 rev = ___ rad Rotational Kinematics
Rotational Kinematics Average angular velocity (avg) is the rotational analog of velocity (v). Velocity = Displacement / Time v = ∆x / t Ang. velocity = Ang. displacement / Time avg = / t
Rotational Kinematics What is the angular velocity of the points on a record rotating at 45 rpm? = 45 rev x (2 rad / 1 rev) = 90 rad = / t = 90 rad / 60 s = 3/2 rad/s
Rotational Kinematics Angular acceleration ()is the rotational analog of acceleration (a). Acceleration = Change in velocity / Time a = ∆v / t Ang. accel. = Change in Ang.veloc. / Time = / t
Rotational Kinematics A record begins spinning from rest and reaches a rotation of 45 rpm in three seconds. What is the angular acceleration of the points on the record? = / t = (3/2 rad/s - 0) / 3 s = /2 rad/s2
Rotational Motion = o + t = (1/2)(o + )t avg = (1/2)(o + ) = ot + (1/2)t2 2 = o2 + 2 Linear Motion v = vo + at ∆x = (1/2)(vo + v)t vavg = (1/2)(vo + v) ∆x = vot + (1/2)at2 v2 = vo2 + 2a∆x Rotational Kinematics
Problem 1 • Find: • ω at t = 0.30 s? • Angle PQ makes with x – axis at this time? Given: ω = 27.5 rad/s at t = 0 α = -10 rad/s2 Line PQ lies on the disc along the x- axis
In addition to stated givens we know Θi= 0° at t = 0s EXAMPLE 1 Given: ω = 27.5 rad/s at t = 0 α = -10 rad/s2 Line PG lies on the disc along the x -axis Part a Solution: Use: ωz = ωiz + αzt for t = 0.3 s ωz = (27.5 rad/s) + (-10 rad/s2)(0.3s) = 24.5 rad/s
In addition to stated givens we know Θi= 0° at t = 0s Part b Part b Solution: Use: Θ = Θi + ωizt+ ½ αzt2 for t = 0.3 s Θ = 0 + (27.5 rad/s)(0.3s) + ½ (-10 rad/s2)(0.3s)2 = 7.8 rad # revolutions?: 7.8 rad (1rev/2π rad) = 1.24 rev The disc has gone through one revolution plus 0.24 into the next. So the angle at that time with the x –axis is: 0.24 (360°/rev) = 87°
Rolling Motion (without slipping) • Rolling without slipping depends on staticfriction between the wheel, ball, etc. and the ground. • The friction is static because the rolling object’s point of contact with the ground is at rest at each moment. • Kinetic friction comes in if the object skids, that is, slides. VERY IMPORTANT CONCEPT!
Rolling Without Slipping Involves Both Rotation and Translation. Reference frame attached to ground Static friction: wheel does not slide Center of mass (CM) Reference frame attached to wheel
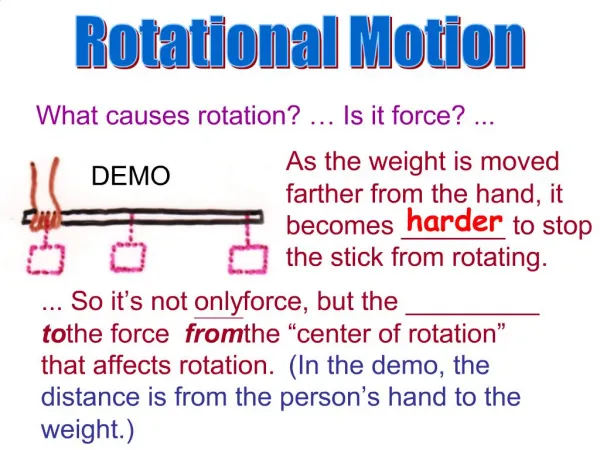
Torque • Torque (t ) deals with the dynamics, or causes of rotational motion. • Dynamics in linear motion dealt with force. • In rotational motion TORQUE is analogous to FORCE in linear motion. • That is, force through a distance F t
Definition of torque (magnitude)* t = RF = RFsinq * Torque is a vector. t = R x F = RFsinq
Example 2 • Torque on a compound wheel. Two thin cylindrical wheels, of radii R1 = 30 cm and R2 = 50 cm, are attached to each other. Calculate the net torque on the two-wheel system due to the two forces shown, each of magnitude 50 N.
Rotational Dynamics; Torque and Rotational Inertia • Linear Acceleration: • directly proportional to force. • inversely proportional to inertia. • Angular Acceleration: • directly proportional to torque. • inversely proportional to the moment of inertia.
Torque and Force Moment of inertia St= Ia SF = ma
Example 3 • Two Weights on a Bar: Different Axis, Different I. Two small “weights” of mass 5.0 kg and 7.0 kg are mounted 4.0 m apart on a light rod (whose mass can be ignored). Calculate the moment of inertia of the system (a) when rotated about an axis half way between the weights, and (b) when the system rotates about an axis 0.50 m to the left of the 5.0 kg mass.
Example 4 • A heavy pulley. A 15.0-N force (represented by FT) is applied to a cord wrapped around a pulley of mass M = 4.0 kg and radius Ro = 33.0 cm. The pulley is observed to accelerate uniformly from rest to reach an angular speed of 30.0 rad/s. If there is a frictional torque (at the axle), t = 1.10 mN, determine the moment of inertia of the pulley. The pulley is assumed to rotate about its center.
Example 5 • Rotating rod. A uniform rod of mass M and length l can pivot freely (i.e., we ignore friction) about a hinge or pin attached to the case of a large machine. The rod is held horizontally and then released. At the moment of release determine (a) the angular acceleration of the rod (b) the linear acceleration of the tip of the rod. Assume the force of gravity acts at the CM of the rod.
Determining Moments of Inertia The are two methods of determining moments of inertia: • By experiment (See Example 4) • By calculus
Using Calculus • For many bodies, or systems of particles, the moment of inertia can be calculated directly, as in Example 3. • Many bodies can be considered as a continuous distribution of mass. In this case we can write: I = R2dm where dm represents the mass of an infinitesimal particle of the body and R is the perpendicular distance of the particle from the axis of rotation.
EXAMPLE 6 • Show that the moment of inertia of a uniform rod length L : a. throught the centre of mass b. throught the end of rod
The Parallel-Axis and Perpendicular-Axis Theorems • Parallel-Axis Theorem: if the moment of inertia I is the moment of inertia of a body of total mass M about any axis, and ICM is the moment of inertia about an axis passing through the center of mass and parallel to the first axis but a distance h away, then I = ICM + Mh2
Angular Momentum and Its Conservation • Linear momentum: p = mv • Angular momentum: L = Iw The SI units for L are kg.m2/s.
Angular and Linear Momentum dL dt St = Ia = dp dt SF = ma =
Conservation of Angular Momentum Law of Conservation of Angular Momentum The total angular momentum of a rotating body remains constant if the net external torque acting on it is zero. When there is zero net torque acting on a body, and the body is rotating about a fixed axis or about an axis through its CM such that the direction doesn’t change, we can write Iw = Iowo = constant
When the skater pulls her arms in, she is decreasing her moment of inertia.
Example 7 • Clutch design. You are designing a clutch assembly for a piece of machinery. The clutch assembly consists of two cylindrical plates, of mass MA = 6.0 kg and MB = 9.0 kg, with equal radii Ro = 0.60 m. They are initially separated. Plate MA is accelerated from rest to an angular velocity w1 = 7.2 rad/s in a time Δt = 2.0 s. Calculate (a) the angular momentum of MA, and (b) the torque required to have accelerated MA from rest to w1.
Clutch design (cont.). Next, plate MB, initially at rest but free to rotate without friction, is allowed to fall vertically so it is in firm contact with plate MA. Before contact, MA was rotating at constant w1, with no friction or other torque exerted on it. Upon contact, the two plates both rotate at a constant angular velocity w2, which is considerably less than w1. (c) Why does this happen, and what is w2?
Rotational Kinetic Energy • Linear Kinetic Energy: K = ½ mv2 • Rotational Kinetic Energy: K = ½ Iw2