Download

1 / 2
40 likes | 251 Vues
Spacecraft Trajectory and Attitude Real-Time Simulator (STARS) Summary

E N D
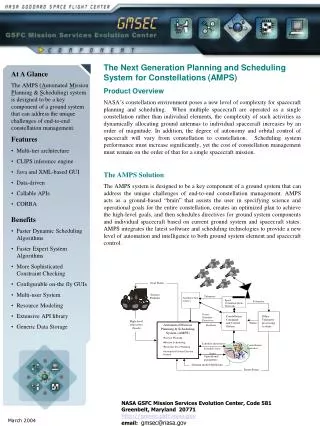
Spacecraft Trajectory and Attitude Real-Time Simulator (STARS) Summary STARS is a distributed, real-time, hardware-in-the-loop simulation system for the research and development of guidance, navigation, and control technology for multi-spacecraft missions such as formations and constellations. At A Glance STARS is a real-time, distributed, multi-spacecraft simulation system for GN&C technology research and development. It is the core software system for the GSFC Formation Flying Test Bed. • Features • GMSEC Compliant • High fidelity models for spacecraft orbit and attitude propagation, reference frames, etc. • Integrates with ground system and instrument simulators through the GMSEC bus, TCP/IP/UDP sockets, etc. • Integrates with STK for simulation visualization EO-1: Single spacecraft flying relative to LS-7 MMS: 4 spacecraft with loose formation control SI: Up to 30 spacecraft with precision control Increasing GN&C Challenge • Benefits • Supports a wide variety of simulation needs, from pre-mission trade studies to GN&C software and hardware technology development • Supports GN&C hardware-in-the-loop testing, e.g. GPS receivers, interspacecraft ranging systems, celestial navigation sensors, etc. STARS development is being driven by the challenge of modeling and simulation for spacecraft formations such as Stellar Imager • Mission Benefits • Provides a web-based, distributed simulation software system for multi-spacecraft mission design, analysis, and test • Can integrate with other GSFC simulators and test beds to provide an end-to-end mission simulation capability with ground and flight systems • Provides the means to test GN&C software and hardware, both for single spacecraft and for multi-spacecraft missions NASA GSFC Mission Services Evolution Center, Code 581 Greenbelt, Maryland 20771 http://gmsec.gsfc.nasa.gov email: gmsec@nasa.gov
GMSEC STARS STARS for Closed-Loop, GN&C Simulation and Test In a GN&C-focused simulation, the environment computer provides real-time spacecraft states to the GPS Signal Generator (GPSSG), which in turn provides RF signals to GPS receivers that properly Doppler shifted to account for motion in space. The GPS receivers track the RF signals and generate position/velocity/time (PVT) solutions, which are then forward to the flight processors which run control Kalman filters, control algorithms, etc. The PVT solutions, as well as the raw data upon which they are based, are transmitted between spacecraft through cross-link communication transceievers. A channel simulator is under development which will delay and Doppler shift the communication signals, as well as account for antenna characteristics and pointing errors. Control algorithms running on the flight processors are used to generate velocity (DV) and attitude changes (DT), or control vectors (u), which are fed back into the Environment computer to close the loop. The components in the shaded box is all hardware and software which resides on the spacecraft. STARS for Distributed, End-to-End Simulation and Test In an End-to-End mission simulation, the FFTB provides the GN&C function while other participating components play their respective roles. For example, the FFTB environment computer generates real-time spacecraft states as if they came from the navigation system, e.g., a GPS receiver. These are subsequently combined with telemetry packets generated by SIMMS and forwarded to a command and control system, e.g., ASIST, and other ground system components via the GMSEC information bus, which is comprised of the middleware, e.g., Rendezvous, and the standardized messages, APIs, etc. In this manner, the ground system elements are provided with realistic telemetry packets that can be used to test components for automation and autonomy; fault detection, isolation, and recovery; goal-oriented commanding; etc.