Efficient Stereo Matching Based on a New Confidence Metric
320 likes | 675 Vues
Efficient Stereo Matching Based on a New Confidence Metric. Won- Hee Lee, Yumi Kim, and Jong Beom Ra Department of Electrical Engineering, KAIST, Daejeon , Korea. 20th European Signal Processing Conference (EUSIPCO 2012). Outline. Introduction Related Work Proposed Algorithm

Efficient Stereo Matching Based on a New Confidence Metric
E N D
Presentation Transcript
Efficient Stereo Matching Based on a New Confidence Metric Won-Hee Lee, Yumi Kim, and Jong BeomRa Department of Electrical Engineering, KAIST, Daejeon, Korea 20th European Signal Processing Conference (EUSIPCO 2012)
Outline • Introduction • Related Work • Proposed Algorithm • Experimental Results • Conclusion
Introduction • For the TV application, stereo matching should be performed in real-time. • Aggregation kernel size is to be small • Aggregation process takes large computation loads • May cause problems in a textureless area • Texture area information incorrect textureless area • Propose a new confidence metric for stereo matching • For efficient refinement (with small kernel size) Objective:
Introduction 35X35 5X35 [4] K. Zhang, J. Lu, and G. Lafruit, “Cross-based local stereo matching using orthogonal integral images,” IEEE TCSVT, 2009.
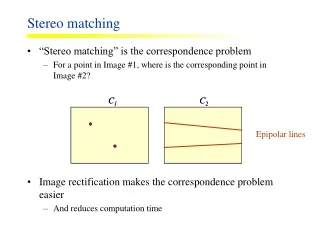
Related Work • Cross-based stereo matching algorithm[4] • Raw matching cost: • Aggregated cost: Ud(x) : local support region : the number of pixels in Ud(x)
Related Work • Cross-based stereo matching algorithm[4] • Winner-take-all: d0(x) : the initial disparity dmax(x) : the maximum disparity
Related Work • Confidence metrics[5]: • Several metrics were proposed to measure the confidence level of match • Utilizing: • Aggregated cost • Curvature of the cost curve • Left-right consistency [5] X. Hu and P. Mordohai, “Evaluation of stereo confidence indoors and outdoors,” in CVPR, 2010
Confidence metrics • 1) Matching score metric (MSM) C : aggregated cost di: the disparity that reveals the ith minimum cost White(High confidence) Black(Low confidence)
Confidence metrics • 2) Curvature of cost curve metric (CUR)
Confidence metrics • 3) Naive peak ratio metric (PKRN)
Confidence metrics • 4) Naive winner margin metric (WMNN) • computes a margin between two minimum costs • normalize it with the sum of total costs
Confidence metrics • 5) Left right difference metric (LRD) min{cR(x - d1, dR)}: the minimum value of a cost curve at the corresponding pixel in the right image.
Proposed Confidence Metric X : Incorrect estimated pixels ‧:Correct estimated pixels
Proposed Confidence Metric • The new metric is proposed as • Characteristic: • extracts the curvature information across a range larger than that including three cost values in the CUR metric • : improve the metric performance for a cost graph with a small curvature. • LoG : a Laplacian of Gaussian filter of n-taps
Refinement • Weighted median filter • Weight : • : the initial disparity of neighboring pixels (same color segment) • : duplication operator offset a slope of function
[6] J. Delon, A. Desolneux, J. L. Lisani, and A. B. Petro, “A nonparametric approach for histogram segmentation,” IEEE TIP, 2007. Refinement • Histogram-based color segmentation algorithm[6]:
Refinement • The filtering is applied only to the limited number if pixels • Due to small size of filtering kernel • To enlarge the filtering range • Vertically propagate the filtered result of a current pixel After weighted median filtering… Propagation Data Datapropagate= DataA A If Weightpropagate> WeightB DisparityB= Disparitypropagate Else Datapropagate= DataB Filtered Disparity (current) Weight B Color segment index C
Experimental Results • Parameters: • n: Laplacianof Gaussian filter of n-taps offset a slope of function
Experimental Results Initial disparity map Bad pixel Confidence map
Experimental Results AUC: Area Under the Curve Venus Tsukuba Teddy Cones
Experimental Results Error rate (Threshold = 1) Error rate (Threshold = 1) Cross-based Adaptive support-weight
Experimental Results [4] [10] Proposed
Conclusion • Presented an efficient stereo matching algorithm • Applying a weighted median filter that is based on the proposed confidence metric. • Successfully refine initial disparities. • Competitive to the existing algorithms with a large size of aggregation kernel.