Efficient Large-Scale Stereo Matching ACCV 2010
250 likes | 684 Vues
Efficient Large-Scale Stereo Matching ACCV 2010. Andreas Geiger, Martin Roser , Raquel Urtasun ,. M.S. Student, Hee -Jong Hong 04. 15. 2014. Outline. Introduction Related Works Proposed Method Experimental Results Conclusion. Introduction. Motivation

Efficient Large-Scale Stereo Matching ACCV 2010
E N D
Presentation Transcript
Efficient Large-Scale Stereo MatchingACCV 2010 Andreas Geiger, Martin Roser, Raquel Urtasun, M.S. Student, Hee-Jong Hong 04. 15. 2014
Outline • Introduction • RelatedWorks • Proposed Method • ExperimentalResults • Conclusion
Introduction • Motivation • On Vehicle system -> Platform needs • Outdoor Scene • Illumination change • High resolution image • Wide slanted region • …
Introduction • Stereo Problems • Ambiguities • Textureless regions • Exposure • Non-Lambertian surfaces • Δz grows quadratically
Related Works • Local Method • Winner Takes All • Global Method • Minimize 1D/2D energy • Seed & Grow Method • Grow disparity components from random seeds
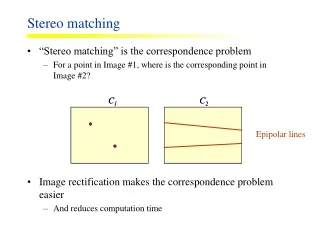
Idea • Assumption: Rectified images • Match Point on epipolar line
Idea • Image pairs contain ’easy’ and ’hard’ correspondences
Idea • Robustly match ’easy’ correspondences on regular grid • Down sampling computation -> fast • Named : Support Point
Idea • Build prior on dense search space • dense matching
ELAS • Notation • Robust Support Points • Disparity • Observation • Local image features
ELAS • Algorithm • Split image domain into support points and dense pixel • Assume factorization of distribution over disparity • Graphical Model
ELAS • Proposed Prior (1) (2)
ELAS • Proposed Likelihood • Laplace distribution (3) Left Image Right Image
ExperimentalResults • Middlebury Benchmark
Joint Histogram Based Cost Aggregation for Stereo Matching - TPAMI 2013 Conclusion
Joint Histogram Based Cost Aggregation for Stereo Matching - TPAMI 2013 Conclusion • Contribution • Simple prior based on sparse feature matches • Reduced ambiguities and run-time • Takes into account slanted surfaces • Real-time 3D reconstruction of static scenes on CPU • C++ / MATLAB code available at http://cvlibs.net • Futurework • Develop better priors • Incorporate segmentation / global reasoning on lines • GPU implementation • (goal: 20 fps at 1-2 megapixels) • Employ as unitary potentials on global methods => smaller label sets