Download

1 / 24
280 likes | 692 Vues
United Arab Emirates University College of Engineering Department of Electrical Engineering Graduation Projects Unit. Design and Control of a Quadrotor. Group Members:. Advisor: Prof. Hassan Noura. Contents: . Detailed Design. Data Acquisition Circuit. Wireless Camera.

E N D
United Arab Emirates University College of Engineering Department of Electrical Engineering • Graduation Projects Unit Design and Control of a Quadrotor Group Members: Advisor: Prof. Hassan Noura
Contents: • Detailed Design. • Data Acquisition Circuit. • Wireless Camera. • Graphical User Interface. • ArduPilot. • Performance Optimization. • Safety Consideration. • Cost Summary. • Introduction. • Objectives. • Applications. • General Overview. • Summary of Achievements in GP I. • AscTec Quadrotor. • Xbee Pro 2.5 Series. • ArduPilot. • DraganFly Eye Cam II.
Introduction: • Quadrotors are aerial vehicles that can be lifted and propelled by four mechanically independent rotors. Quadrotors are capable of: • VTOL. • Hovering.
Project Objectives: • To do the following: • Add a wireless video camera. • Add a GPS Navigation. • Establish a Data Link. • Develop a Ground Station Interface.
Applications: • Aerial Photography. • Covering Crime Scenes. • Controlling road traffics. • Reaching dangerous areas. • Inspection for suspicious objects. • Conduct site measurements and monitoring buildings, bridges, electric tours, roads, etc.
Summary of Achievements in GP I: • AscTec Pelican[1] • GPS Navigation. • 500 grams Payload. • Max. Speed 50 km/h. • Min. Speed 0 km/h. • Launch Type VTOL. • Max. wind Speed 36 km/h. • Max. Altitude 50 m. • Max. Flight Time 20 min.
Summary of Achievements in GP I: ArduPilot • Weight: • 15 g. • Power: • 5 V @ 100 mA. • Price: • $ 300. • Mobile Ground Station. Open Source !!
Summary of Achievements in GP I: XBee Pro 50mW 2.5 [2] • Data Rate: • 250 Kbps. • Power: • 3.3V @ 295mA. • Range: • Up to 1.6 Km. • Price: • $ 40.95.
Summary of Achievements in GP I: • DraganflyEyecam II [3] • Weight: 9 grams. • Size: 15 x 22 x 32 mm. • Range: 300 m. • Resolution: 365K PAL. • Power: 5 V @ 100 mA.
Detailed Design: Data Acquisition Circuit:
Detailed Design: Data Acquisition Circuit: (LM35) • Microcontroller Code • DEFINE ADC_BITS 10 • DEFINE ADC_SAMPLEUS 50 • Temp VAR word • result VAR word • ref CON 1024 • ADCIN 0, Temp ' Read the first ADC channel • result = (Temp*10)*/ ref
Detailed Design: Data Acquisition Circuit: (MQ - 7) • Microcontroller Code • DEFINE ADC_BITS 10 • DEFINE ADC_SAMPLEUS 50 • Gas VAR word • ref CON 1024 • ADCIN 1, Gas • result = (Gas)*/ ref
Detailed Design: Data Acquisition Circuit: (GPS) • NMEA PROTOCOL: • $GPRMC,105408.000,A,2414.2860,N,05544.4821,E,0.21,130.81,190510,,*0F • 105408.000 : the GMT time when this sentence was received. • A: Data is valid ( V means data is not valid). • 2414.2860: Latitude ( ddmm.mmmm). • N: North or south indicator ( in this case this is north). • 05544.4821: Longitude (dddmm.mmmm). • E: East or West indicator ( In this case, this is East). • 0.21: Speed over gorund ( knots). • 130.81: Course over gorund ( degrees). • 190510: Date ( 19th- May – 2010 ). • *0F: Checksum.
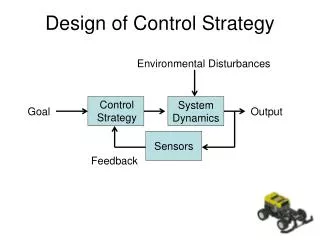
Detailed Design: Wireless Camera: QUADROTOR Transmitter Camera 2.4 GHz VIDEO LINK Receiver TV CARD GROUND STATION
Detailed Design: Graphical User Interface:
Detailed Design: ArduPilot: • Parts come separated • Assembled in the lab.
Detailed Design: Mobile Ground Station: • Atmel Processor. • Can be used anywhere. • (Battery operated)
Performance Optimization: Propellers Protection Base Protection
Performance Optimization: • Microcontroller Code • Power Optimization: • serin2 PORTB.7, 188, char • If char = "1" then • high camera • endif • if char = "0" then • low camera • endif
Safety Considerations: • Training. • Testing Area. • LiPo Batteries. • Maintenance.
References: • http://www.asctec.de/asctec-pelican/ • http://www.sparkfun.com/commerce/product_info.php?products_id=9111 • http://www.robotshop.ca/draganfly-eyecam-extreme-video-system.html