Download
1 / 20
200 likes | 336 Vues
M M S. Minerals Management Service. Sperm whale seismic study in Gulf of Mexico-acoustics focus. General background My role: 3D tracking tagged/untagged animals—working a few months at a time Single array localization-2000 Tag/array integration-2001 Dual-array localization-2002-?

E N D
MMS Minerals Management Service Sperm whale seismic study in Gulf of Mexico-acoustics focus • General background • My role: 3D tracking tagged/untagged animals—working a few months at a time • Single array localization-2000 • Tag/array integration-2001 • Dual-array localization-2002-? • Upcoming plans Aaron Thode, Marine Physical Lab, SIO, UCSD Marine Fisheries Service
Background-SWAMP cruises 2000-2001 • Sponsors • Minerals Management Service • International Association of Geophysical Contractors • Marine Fisheries, SE, 2000-2001 • Focus: effect of seismic exploration on sperm whales • Endangered species • Acoustically active • “Resident” populations • Mississippi Canyon • De Soto photo: Keith Mullin, SE Fisheries Service
Present SWSS study centers on two types of tags • Bruce Mate’s satellite tag (STAG) • Long duration deployments—long-term habitat shift? • Over 15 animals tagged, mostly on one day • WHOI digital recording tag (DTAG) • Also pressure, orientation, acceleration • High-resolution behavioral responses, energy studies, 3D pseudeotracks • Visual, biopsy, acoustic component • Nineteen animals tagged in 2002, three simultaneously under controlled seismic exposure, many more under uncontrolled exposures.
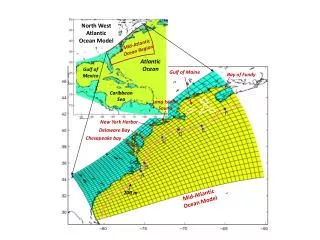
Gulf of Mexico an acoustically unfavorable propagation environment
Measured and computed detection ranges predict 3-10km, depending on source depth Source: MATLAB KRAKEN (should also Be repeated With Bellhop) Three different towed array systems 30-100m depth, give ~6km range
Bottom-mounted sensors have similar predicted ranges Stennis Space Center (George Ioup) has placed bottom-mounted sensors in general vicinity of SWSS. Some coordination, little overlap so far.
To date passive acoustic data collection program uses towed arrays with few elements->close range work Outgrowth of Jay Barlow work, SWFSC. Also arrays from Ecologic, WHOI
My focus has been tracking untagged animals, under various conditions • Goal: statistically significant samples of low-resolution dive profiles under tagging/seismic conditions • Complements high-resolution low volume tagging runs. • Three branches: • Single array localization-2000 • Tag/array integration-2001 • Dual-array localization-2002-?
s t d b SWSS acoustic work involves close follows at slow speeds NOAA ship Gordon Gunther 0.5-1.5 kts 930 m • Overnight tracking allowed biopsy, tagging in morning • July 3 typical-slow tow through middle of traveling pod • Silty/muddy flat bottom, depth measured with fathometer • Pod composition assumed to be females and juveniles• TDR was NOT attached during this particular sequence
tdt tdb tds Bearing 1 Bearing 2 q R za a zw
Example from one dive: • Good depth resolution from 100 m depth • Range uncertainty increases with animal depth • Tracking ends when bottom returns vanish
Ray refraction may be neglected for ranges less than 1 km True range (m)
During first stage of dive cycle inter-click interval is closely related to two-way travel time from whale to bottom. • During second stage bottom bounces vanish and timing becomes irregular. • Why so many clicks related to bottom? (New Zealand counterexample)
Some work has been performed on merging tag/array data • Simultaneous recordings on tag/array corrects pseudotrack. • Acoustics does not have control of ship during most tagging operations, with interesting results. Array bearing (deg) Time (sec)
The inter-click interval (ICI) used to identify tagged whale out of 7-13 other animals
Using surface reflections only gives three different time-of-arrivals, with two arrays Ishmael display: David Mellinger
Two arrays can eliminate need for bottom reflection, if array depths measured • Restrictions: • Array depths known (difficult!) • Depths > 40 m (slow towing speed) • Doesn’t work broadside. • Assumes straight-line propagation
Sept. 5 proof-of-concept trial demonstrated results Range vs. time broadside endfire Depth vs. time ● Array depth had to be estimated for one array. ●Measured descent rate of 91 meters per minute, similar to 88 meter per minute measurements from next-day tag.
Two arrays plus tag refines localization-”leverages” tag info 2001-Array depths still the bug-bear!
Everything seems up in the air, as opposed to in the water • What ship for seismic playback? • There was a lot of uncontrolled seismic exposures in 2002 • What ship for research? • Last year’s ship was way too noisy • What “holes” are there? • The off axis acoustic signature of seismic vessels is not known. • Modeling by IAGC free-space only, no waveguide effects included. • Better arrays needed • Bottom-mounted sensors? Stennis?