Open-Source Autopilot Development for Multiplex FunJet R/C Plane
200 likes | 328 Vues
This project aims to create an open-source autopilot system (GPL licensed) for the Multiplex FunJet R/C plane using the Autopilot Tiny v2.11. By providing a detailed project handbook with simplified, step-by-step instructions, we aim to facilitate the recreation of the project by average engineers. The focus is on addressing electrical needs to support aerospace engineering teams. Key tasks include configuring components like GPS receivers, sensors, and control boards, and enabling autonomous flight capabilities.

Open-Source Autopilot Development for Multiplex FunJet R/C Plane
E N D
Presentation Transcript
Open-source unmanned aircraft system Advisors: Prof. Hammer Prof. Ernie Group Members: Shuohan Wan Dustin Douglas Kevin Oberg Sponsor: Lockheed-Martin
Project Goals • Open-source (GPL) autopilot on RC Plane • Autopilot- Tiny v2.11 • RC Plane- Multiplex FunJet • Create project handbook • Contains step-by-step simplified details necessary to recreate project in less time • Understandable to the average engineer • Assist two Aerospace Engineer teams • These AEM teams handle the physical planes • We help with all necessary electrical needs
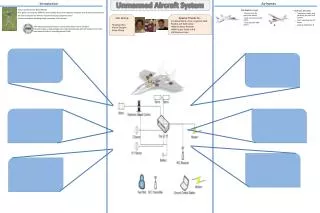
Goal Specifics • FunJet plane requires configuration of a number of components • AutoPilot Control Board • Battery • Radio-modem and antenna • GPS receiver • IR sensors for X-, Y-, and Z-axes • Motor and controller • RC receiver and antenna • Servos • International Traffic in Arms Regulations (ITAR) • Open-source (GPL) necessary to be able to sell in international markets
Prior Work • Many types of commercial and enthusiast autopilots available • Paparazzi already deployed on FunJets as well as other airframes • Not well documented • Paparazzi Wiki • Useful for general info • Fails to provide some specifics
Requirement Specifications • Successfully fly* the Multiplex FunJet under autopilot control (uses elevons) • After flying FunJet, fly aircraft with traditional configuration (ailerons, elevator, rudder) * Successful flight test entails manual takeoff and landing with autonomous flight by wire controlled by a PC ground station
Requirement Specifications (2) • Aerospace Engineering teams support • We need to assist these two teams with any electrical or software related difficulties they encounter • Manual • Professor Hammer would like to have a detailed handbook that walks through the process • Stretch goals • Autonomous takeoff/landing • Video/Picture feedback • Multiple aircraft flying simultaneously • Build/Fly our own FunJet
Proposed Solution • Conventional R/C electronics • Receiver • Servos • Motor/ESC • Battery • Paparazzi Equipment • Tiny v2.11 • IR sensors • Modem
Proposed Solution Cont. • Conventional R/C Functional Diagram
Proposed Solution Cont. • Paparazzi Augmented R/C Functional Diagram
Proposed Solution Cont. • Tiny v2.11 becomes the heart • Everything is directly connected • R/C receiver is auxiliary communication • Serves as backup communication device
Proposed Solution Cont. • Manual R/C control • Takeoffs • Landings • Modem failure • Tiny v2.11 control • Autonomous flight (Auto 2) • Semi-autonomous flight (Auto 1) • Fly by wire (air) through GCS
Budget/Costs • Majority of budget spent on pre-crimped wires • Pre-crimped wire ~$30 per plane • Crimper would cost ~$250 if bought separately • The connector, 3-8 pin, cost ~$5 per plane • Parts provided by Lockheed Martin • Multiplex FunJet ~$75 • IR sensors ~$70 • RF Modem ~$200 • Servos/receiver~$80 • Motor/ESC~$110
Timeline • 10/11 – FunJet manual flight • 10/25 – FunJet autonomous flight • 10/25 – Trainer manual flight • 11/2 – Trainer autonomous flight • 12/8 – Implement advanced features • Camera • Interface paparazzi with AEM flight simulator • 12/8 – Final draft of Paparazzi Handbook
Summary • We are making good progress towards our autonomous flight goal • Most electrical issues have been dealt with • We are learning
Special thanks to… Reid Plumbo, Todd Colten, Jeff Hammer AEM Paparazzi Team A: Jacob Rohrer, Peter Rohrer, Ben Bradley, Richard Schiell AEM Paparazzi Team B: Ben Bradley, Nate Olson, Pat O’Gara, Sean Jarvie
Flying Fields • SPRC in Ham Lake
Resources • Lockheed Engineers • Reid Plumbo • Todd Colten • Professor Hammer • AEM Team A & B
Board Flashing • Step 1: Flash bootloader using special cable • Step 2: Flash GPS tunnel using USB programming cable • Step 3: Program GPS using U-BLOX software and special cable • Step 4: Flash autopilot program using USB programming cable