Download
1 / 17
170 likes | 292 Vues
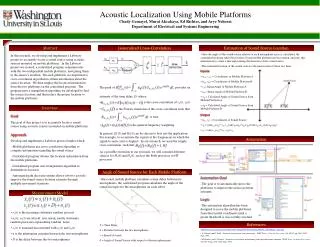
This paper discusses a novel approach to indoor localization for mobile users lacking GPS access. It utilizes historical RSSI measurements to create a trace space, allowing accurate location estimation in indoor settings, achieving approximately 1m accuracy. The methodology includes training and localization phases, employing Radial Basis Function (RBF) fitting to match RSSI patterns to geographic positions. The study demonstrates the effectiveness of this algorithm across various link quality measures, paving the way for future applications in location-based services and smart environments.

E N D
Localization of Mobile Users Using Trajectory Matching ACM MELT’08 HyungJune Lee, Martin Wicke, BranislavKusy, and LeonidasGuibas Stanford University
Motivation • Location is an important and useful resource • Push local information to nearby mobile users • Restaurant, Café, Shopping center on sale, … • Building automation, etc. • GPS not available • Indoor, mobile environment • ~1m-accuracy • Usable for location-based service
Motivation • RSSI-based localization • Indoor setting • Due to reflection, refraction, and multi-path fading,specific model does not work • More severe link variation caused by mobility • Range-free methods • Connectivity & Triangulation: DVhop[Niculescu03] , APIT[He05] • RSSI pattern matching:RADAR[Bhal00], MoteTrack[Lorincz07] • Bayesian inference & Hidden Markov Model: [Haeberlen04], [Ladd04], LOCADIO[Krumm04] • Idea: Use historical RSSI measurements RSSI graph
Outline • Trace Space • Localization algorithm • Training Phase with RBF construction • Localization Phase • Evaluation • Conclusion and Future work
Trace Space • Traces ofRSSI readings form a trace space . • Each trace T corresponds to a location • Learn to match a trace to a positioni.e., L(∙): → R2 3 (x1, y1) (x1, y1) 2 1 x y → R2 T = L = : (x2, y2) 4 5
Training Phase with RBF Fitting • Training input r in trace space • Training output p inR2 space • Solve linear systems of training data by least-squares • Obtain L(∙) function 6
Localization Phase • Localization phase • Calculate the L (∙) given current trace T in test sets • Sparse interpolation in trace space • Handles noisy input data gracefully • Extrapolates to uncharted regions Location X LX (T) LY (T) Location Y 7 Illustration from “Scattered Data Interpolation with Multilevel B-Splines” [Lee97]
Evaluation 8 • MicaZ motes • CC2420 radio chip • 10 stationary nodes • 1 mobile node • 14 waypoints location • Ground-truth: (r(t), p(t)) • Training RSSI vector r(t) • Training position p(t) • linear interpolation between waypoints 9 7 1 6 10 1 5 4 2 3 RSSI graph
Evaluation • Training phase: (a), (b), (c), (d), (e) • Testing phase: (f), (g), (h), (i) • 5 runs for each path • Error measures • Position error • Path error
History size k Influence of Historical data 2.4 m 1.28 m
Other Link Quality Measures 2.02 m 1.74 m 1.28 m
Conclusion • Historical RSSI values significantly increase the fidelity of localization (mean position error < 1.3 m) • Our algorithm also works well with any link quality measurements, e.g., LQI or PRR, which allows flexibility of the algorithm
Future work • Prediction of future location • Scalability • Dynamic time warping for different speed
Questions? HyungJune Lee abbado@stanford.edu
Radial Basis Function Fitting(Backup) • Multi-quadratic function • By least-squares
# of RBF centers Nc Influence of # of RBF centers Nc(Backup)
Burst window size b Influence of Average Window Size b (Backup)