
Uploaded by
oleg-bowers
1 SLIDES
120 VUES
10LIKES
RoboCrane Localization with Kalman Filter for Robot Xavier
DESCRIPTION
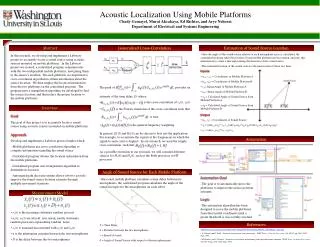
Utilizing a Kalman filter, I am localizing Xavier, a robot equipped with sonar sensors, within the workspace defined by RoboCrane. This technique is chosen based on prior familiarity and will be showcased as Xavier navigates the area relative to the Crane's base.
Download
1 / 1
Download Presentation

Télécharger la présentation
RoboCrane Localization with Kalman Filter for Robot Xavier
An Image/Link below is provided (as is) to download presentation
Download Policy: Content on the Website is provided to you AS IS for your information and personal use and may not be sold / licensed / shared on other websites without getting consent from its author.
Content is provided to you AS IS for your information and personal use only.
Download presentation by click this link.
While downloading, if for some reason you are not able to download a presentation, the publisher may have deleted the file from their server.
During download, if you can't get a presentation, the file might be deleted by the publisher.
E N D
Presentation Transcript
Localization Using Xavier I am going to use a Kalman filter to localize Xavier, a robot with sonar sensors. It will localize itself relative to the RoboCrane, which defines Xavier’s workspace. I am using this technique because I have studied it in the past and so am familiar with it. I will demonstrate the filter by having Xavier go around the workspace, using the Crane’s base as a guideline.






More Related
Audio
Live Player