Collaborative Camera Control Algorithms Evaluation
Explore exact and distributed algorithms for collaborative camera control using the ShareCam system. Learn about satisfaction metrics, objective functions, and properties of global satisfaction. Dive into various algorithms like the BruteForce, Approximation, Exact, and Distributed algorithms, with a focus on optimization and efficiency.

Collaborative Camera Control Algorithms Evaluation
E N D
Presentation Transcript
Exact and Distributed Algorithms for Collaborative Camera Control Dezhen Song* A. Frank van der Stappen† Ken Goldberg* * UC Berkeley, USA † Utrecht University, Netherlands
n users 1 pan, tilt, zoom robotic camera
OneOptimal Frame ShareCam Problem: Given n requests, find optimal frame
Taxonomy (Tanie, Matsuhira, Chong 00) Single Operator, Single Robot (SOSR): Single Operator, Multiple Robot (MOSR): Multiple Operator, Single Robot (MOSR):
Related Work • MOSR systems • Cinematrix (91) • Cannon, McDonald, et al. (97) • Goldberg, Chen, et al. (00, 01) • Goldberg, song, et al. (02) • Internet robots • Tanie, K., Chong, N. Et al(01) • Jia, S. And K. Takase (01) • Hu, H., Yu, L., Tsui, P., Zhou, Q (01) • Safaric, R. Et al. (01) • Goldberg and Siegwart (02)
Related Work • Facilities Location Problems • Megiddo and Supowit [84] • Eppstein [97] • Halperin et al. [02] • Rectangle Fitting • Grossi and Italiano [99,00] • Agarwal and Erickson [99] • Mount et al [96] • Kapelio et al [95]
Related Work • Similarity Measures • Kavraki [98] • Broder et al [98, 00] • Veltkamp and Hagedoorn [00] • Distributed robot algorithms • Sagawa et al [01], Safaric[01] • Parker[02], Bulter et al. [01] • Mumolo et al [00], Hayes et al [01] • Agassounon et al [01], Chen [99]
Problem Definition Requested frames: i=[xi, yi, zi], i=1,…,n
3z (x, y) Problem Definition • Assumptions • Camera has fixed aspect ratio: 4 x 3 • Candidate frame = [x, y, z] t • (x, y) R2(continuous set) • z Z (discrete set) 4z
Problem Definition • “Satisfaction” for user i: 0 Si 1 = i = i Si = 0 Si = 1
Satisfaction Metrics • Symmetric Difference • Intersection-Over-Union Nonlinear functions of (x,y)
Satisfaction Metrics • Intersection over Maximum: Requested frame i , Area= ai Candidate frame Area = a pi
Intersection over Maximum: si( ,i) Requested frame i Candidate frame si = 0.20 0.21 0.53
(for fixed z) Requested frame i Candidate frame (x,y)
Satisfaction Function • si(x,y) is a plateau • One top plane • Four side planes • Quadratic surfaces at corners • Critical boundaries: 4 horizontal, 4 vertical
Objective Function • Global Satisfaction: for fixed z ShareCam problem: Find * = arg max S()
Properties of Global Satisfaction S(x,y) is non-differentiable, non-convex, but piecewise linear along axis-parallel lines.
ShareCam Algorithms Bruteforce Algorithm • Compute S at each pixel (x,y) • O(whmn): • w, h: width and height of panoramic image • m: number of zoom levels • n: # users
y x Approximation Algorithm Compute S(x,y) at lattice of sample points: d
Approximation Algorithm * : Optimal frame : Smallest frame at lattice that encloses* • Run Time: • O(w h m n / d2) : Optimal at lattice
x Exact Algorithm • Define “Virtual corners” • Consider a pair of requested frames and • Their critical boundaries y
x Exact Algorithm • Virtual corner: Intersection between boundaries • Self intersection: • Frame intersection: y
Exact Algorithm • Claim: An optimal point occurs at a virtual corner. Proof: • Along vertical boundary, S(y) is a 1D piecewise linear function: extrema must occur at x boundaries
Exact Algorithm Exact Algorithm: Check all virtual corners • (mn2) virtual corners • (n) time to evaluate S for each • (mn3) total runtime
Improved Exact Algorithm • Sweep horizontally: solve at each vertical • Sort critical points along y axis: O(n log n) • 1D problem at each vertical boundary O(nm) • O(n) 1D problems • O(mn2) total runtime O(n) 1D problems
Distributed Algorithm More users More computers available
Distributed Algorithm • At the Server • Sort horiz. boundaries • O(n log n) • At the Client • Solve 1D problem for own vertical boundaries. • O(nm) • O(n(m+ log n)) Total Four 1D problems
Current Work • New Approx Algorithms: • With Har-Peled, Koltun • Stair-like approximation • Dynamic segment tree • O(n log n) • Weighted Requests
Future Work • Continuous zoom (m=) • Multiple outputs: • p cameras • p views from one camera • “Temporal” version: fairness • Integrate si over time: minimize accumulated dissatisfaction for any user • Network / Client Variability: load balancing • Obstacle Avoidance
The Tele-Actor Server Operators
Summary • Satisfaction Metric: • Intersection over Maximum • ShareCam Problem : find * = arg max S() • Critical Points at Virtual Corners • Exact Algorithms: • Distributed Algorithm: • tele-actor.net/sharecam O(mn2) O(mn)
Summary • A collaborative camera control system • Satisfaction metric • Virtual corner based algorithms • Distributed algorithm • www.tele-actor.net/sharecam
Regular web-cam Collaborative camera control Introduction Queue
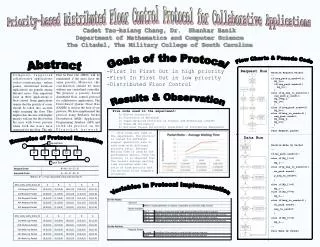
Results & Discussion • Speed of naive (B) and fast (V): • AMD K7 950Mhz • 1.2 GB memory • JDK 1.3.1 • For a fixed z