Command of a rover using FPGA, Labview and Bluetooth
130 likes | 378 Vues
“POLITEHNICA” UNIVERSITY OF TIMIŞOARA ELECTRONICS AND TELECOMUNICATIONS FACULTY DEPARTMENT OF APPLIED ELECTRONICS. Scientific Superviser: Prof. Dr. Eng. Aurel GONTEAN Author: Horia Octavian SABU. Command of a rover using FPGA, Labview and Bluetooth. Timişoara 2010. Presentation Overview.

Command of a rover using FPGA, Labview and Bluetooth
E N D
Presentation Transcript
“POLITEHNICA” UNIVERSITY OF TIMIŞOARA ELECTRONICS AND TELECOMUNICATIONS FACULTY DEPARTMENT OF APPLIED ELECTRONICS Scientific Superviser: Prof. Dr. Eng. Aurel GONTEAN Author: Horia Octavian SABU Command of a rover using FPGA, Labview and Bluetooth Timişoara 2010
Presentation Overview • DC Motors • H-Bridge • FPGA Board • Bluetooth Module • LabVIEW programs • VHDL code • Conclusions Horia Octavian SABU
DC Motors This is how a DC motor looks on the inside: Horia Octavian SABU
H-Bridge - Principle Horia Octavian SABU
H-Bridge - Implementation The PCB Layout: The board in action: Horia Octavian SABU
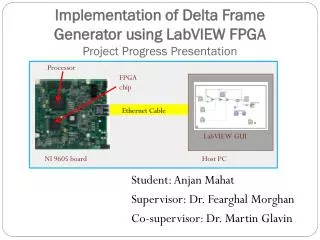
FPGA Board This is where all the magic happens: Bluetooth and H-bridge connections 6V input from the battery pack Duty cycle display Switches control direction, PWM generation and manual override PWM adjustment using buttons Horia Octavian SABU
Bluetooth Module Class 1 BluetoothRadio Modem Transmission distance: 100m Low power consumption: 25mA avg Frequency: 2.4~2.524 GHz Operating Voltage: 3.3V-6V Serial communications: 2400-115200bps Built-in antenna Small dimensions: 51.5x15.8x5.6mm Horia Octavian SABU
LabVIEW PC version ASCII code sent via bluetooth W, A, S, D keys or arrow keys are used to control direction Binary representation of the code being sent Slider modifies the duty cycle What keys are being pressed Horia Octavian SABU
LabVIEW – under the hood Sending the commands via bluetooth Bluetooth connection Forward, back, left and right assesment Keyboard input Conversion to ASCII codes PWM generation Horia Octavian SABU
LabVIEW smartphone version The very user-friendly interface: Direcion controls PWM generation Horia Octavian SABU
VHDL – the big picture Horia Octavian SABU
Conclusions • LabVIEW provides a great environment to control the rover, either on the PC or on the smartphone • The Nexys2 FPGA board permits further improvement of the design without the need to replace existing hardware • A very challenging and complex project (but at the same time – fun!) Horia Octavian SABU
Thank You ! The Shenilozaur Horia Octavian SABU