Download
1 / 40
400 likes | 545 Vues
Validation of uncertain predictions against uncertain observations. Scott Ferson, scott@ramas.com 16 October 2007, Stony Brook University, MAR 550, Challenger 165. V & V. Verification (checking the math) Code testing Interval analysis, probability bounds analysis Units/dimension checking

E N D
Validation of uncertain predictions against uncertain observations Scott Ferson, scott@ramas.com 16 October 2007, Stony Brook University, MAR 550, Challenger 165
V & V • Verification (checking the math) • Code testing • Interval analysis, probability bounds analysis • Units/dimension checking • Validation (checking against data)
Goals • Objectively measure the conformance of predictions with empirical data • Use this measure to characterize the reliability of other predictions
Initial setting • The model is fixed, at least for the time being • No changing it on the fly during validation • A prediction is a probability distribution • Expressing stochastic uncertainty • Observations are precise (scalar) numbers • Measurement uncertainty is negligible relaxed later
Validation metric • A measure of the mismatch between the observed data and the model’s predictions • Low value means a good match • High value means they disagree • Distance between prediction and data
Desirable properties of a metric • Should be expressed in physical units • Should generalize deterministic comparisons • Should reflect performance of full distribution • Shouldn’t be too sensitive to long tails • Should be a true mathematical metric • Should be unbounded (you can be really off)
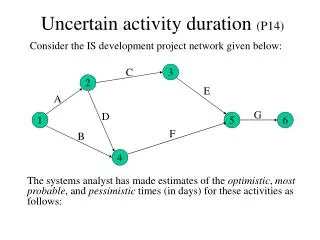
How the data come 400 350 300 Temperature [degrees Celsius] 250 200 600 700 800 900 1000 Time [seconds]
1 Probability 0 200 250 300 350 400 450 Temperature How we look at them
One suggestion for a metric 1 Area or average horizontal distance between the empirical distribution Snand the predicted distribution Probability 0 200 250 300 350 400 450 Temperature
a = L(2,1.6) + 5 a ~(range=[5.25515,14.5592], mean=7, var=[1.94,2.56]) b = N(7,2.25) c = mix( N(4,0.5), N(10,0.5)) d = 0.9*a + 0.4 show a in black show c in blue hide c show b in blue hide b show d in blue hide d Reflects full distribution 1 Matches in mean Both mean and variance Matches well overall 0 0 10 20 1 0 0 10 20 1 Probability 0 5 15 10
Single observation 1 Probability 0 0 1 2 3 4
Single observation • A single datum can’t match an entire distribution (unless it’s degenerate) • Single datum matches best if it’s at the median • If the prediction is a uniform distribution over [a,b], a single observation can’t be any ‘closer’ to it than (b a)/4
When the prediction is really bad • The metric degenerates to simple distance • Probability is dimensionless, so units are the same 1 d 24 Probability 0 0 2 4 6 8 10 12 14 16 18 20 22 24 26 28
Depends on the local scale 1 • The metric depends on the units • Can standardize (divide by s.d.), but this means the metric will no longer be in physical units d 0.45 0 0 1 2 3 4 1 d 45 0 0 100 200 300 400
Why physical units? 1 • Distributions in the left graph don’t overlap but they seem closer than those on the right 1 Probability 0 0 0 1 2 3 4 0 1 2 3 4
Why an unbounded metric? 1 • Neither overlaps, but left is better fit than right • Smirnov’s metric Dmax considers these two cases indistinguishable (they’re both just ‘far’) Probability 0 0 1 2 3 4 0 10 20 30 40
The model says different things 400 350 300 Temperature [degrees Celsius] 250 200 600 700 800 900 1000 Time [seconds]
1 Probability 0 200 250 300 350 400 450 Temperature
Pooling data comparisons • When data are to be compared against a single distribution, they’re pooled into Sn • When data are compared against different distributions, this isn’t possible • Conformance must be expressed on some universal scale
u2 u3 u1 N(2, 0.6) ~normal(range=[0.454502,3.5455], mean=2, var=0.36) max(0.0001,exponential(1.7)) ~(range=[0.0001,9.00714], mean=[1.699999,1.7001], var=[2.43,2.89]) mix(U(1,5),N(10,1)) * 2.3 ~(range=[2.3,28.9244], mean=14.95, var=70.9742) Universal scale ui=Fi(xi) where xi are the data and Fi are their respective predictions 1 1 1 Probability 0 0 0 1 10 100 1000 0 1 2 3 4 0 5 10
Backtransforming to physical scale 1 G u Probability Probability 0 1 2 3 4 5 0
Backtransforming to physical scale • The distribution of G1(Fi(xi)) represents the empirical data (like Sn does) but in a common, transformed scale • Could pick any of many scales, and each leads to a different value for the metric • The distribution of interest is the one used for the regulatory statement
Number of function evaluations • Some models are difficult to evaluate • Extracting distributional predictions may be expensive in terms of function evaluations • Blame the modeler rather than the validator! • Can our validation metric be applied when only very coarse predictions based on few function evaluations are available?
Coarse prediction 1 Prediction can be expressed as an ‘empirical’ distribution too Probability 0 0 1 2 3 4
Statistical test for model accuracy • Kolmogorov-Smirnov test of distribution of ui’s against uniform over [0,1] • This tests whether the empirical data are as though they were drawn from the respective prediction distributions Probability integral transform theorem (Angus 1994) says the u’s will be distributed as uniform(0,1) if xi ~ Fi • Assumes the empirical data are independent of each other
Generalizations • Nonrandom sampling of observations • Measurement uncertainty of empirical observations • Imprecise predictions (intervals or p-boxes)
Epistemic uncertainty in predictions a = N([5,11],1) show a b = 8.1 show b in blue b = 15 breadth(env(rightside(a),b)) 4.023263478773 b = 11 breadth(env(rightside(a),b)) / 2 0.4087173895951 • In left, the datum evidences no discrepancy at all • In middle, the discrepancy is relative to the edge • In right, the discrepancy is even smaller 1 1 1 Probability d 0.4 d = 0 d 4 0 0 0 0 10 20 0 10 20 0 10 20
Epistemic uncertainty in both z=0.0001; zz =9.999 show z,zz a = N([6,7],1)-1 show a b = -1+mix(1,[5,7], 1,[6.5,8], 1,[7.6,9.99], 1, [3.3,6], 1,[4,8], 1,[4.5,8], 1,[5,7], 1,[7.5,9], 1,[4,8], 1,[5,9], 1,[6,9.99]) show b in blue b = -0.2+mix(1, [9,9.6],1, [5.3,6.2], 1,[5.6,6], 1,[7.8,8.4], 1,[5.9,7.8], 1,[8.3,8.7], 1,[5,7], 1,[7.5,8], 1,[7.6,9.99], 1, [3.3,6], 1,[4,8], 1,[4.5,8], 1,[5,7], 1,[8.5,9], 1,[7,8], 1,[7,9], 1,[8,9.99]) breadth(env(rightside(a),b)) 2.137345705795 c = -4 b = -0.2+mix(1, [9,9.6],1, [5.3,6.2]+c, 1,[5.6,6]+c, 1,[7.8,8.4], 1,[5.9,7.8], 1,[8.3,8.7], 1,[5,7], 1,[7.5,8], 1,[7.6,9.99], 1, [3.3,6], 1,[4,8], 1,[4.5,8]+c, 1,[5,7]+c, 1,[8.5,9], 1,[7,8], 1,[7,9], 1,[8,9.99]) breadth(env(rightside(a),b)) / 2 1.329372857714 1 1 1 d = 0 d 0.05 d 0.07 Probability 0 0 0 0 5 10 0 5 10 0 5 10 Predictions in white Observations in blue
Validation: summary • Both assessment and reliability of extrapolation • How good is the model? • Should we trust its pronouncements? • Need metric to be both ad hoc and universal • Updating is a separate activity • Epistemic uncertainty introduces some wrinkles • Full credit for being modest about predictions
Complexities we can handle • Variability in the experimental data • Prediction is a probability distribution rather than a point • Large measurement uncertainty in the data • Multiple predictions (dimensions) to be assessed • Available data aren’t directly relevant to the predictions • Validation data collected under other conditions • Model’s predictions are extremely expensive to compute
Definition of a true metric • Positive, d(x, y) 0 • Symmetric, d(x, y) = d(y, x) • Identicals indistinguishable, d(x, y) = 0 x = y • Triangle inequality, d(x, y) + d(y, z) d(x, z) • Quasi-, semi-, pseudo-, ultra-metric
Other metrics • Area is only one of many possible metrics • Area favors central tendency (median) • Could also use the medial distance from a datum to the distribution, or maybe the 95th percentile of distances • Might prefer conformance in the tails, or one tail in particular
Degrees of impossibility • If a datum is completely outside the range of the prediction, it’s ‘impossible’ • Transforming to the u scale makes it 0 or 1 • We’d like to preserve how far outside it is
F<(x), x < 0 F*(x) = F(x), 0 x 1 F>(x), x > 1 2 1 1 0 0 10 20 -1 0 0 10 30 20 40 Extended distribution functions F F* Probability Extension slopes can be set by the distribution’s dispersion, to mimic tails, or as just relocated 45 lines
Using extensions in the metric • Extended functions Fi* can be used to get u’s (now no longer ranging only on [0,1]) • The common backtransformation scale can also be extended to G* to accept these u’s • This allows values considered impossible by the prediction to be represented
Vector of outputs • Usually want to treat dimensions separately • Possible to unify (pool) prediction-observation pairs even if they’re from different dimensions • Degrees, seconds, pascals, meters, etc. • But there’s no G for backcalculation and so there can’t be a physically meaningful scale
Comparing accuracies • Questions like “Is the match for temperature as good as the match for conductivity?” also require a universal scale to which all physical dimensions must be transformed • If we do this, the metric becomes a norm
Uncertainty about a distribution 1.0 0.8 0.6 Cumulative probability 0.4 95% confidence bounds on the normal distribution 0.2 0.0 300 350 400 450 500