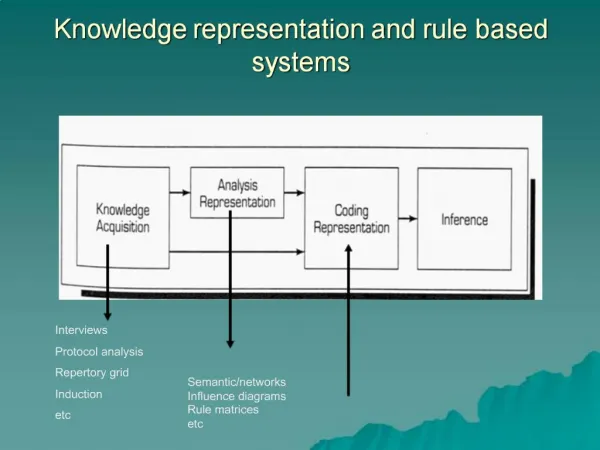
Representation Systems
Representation Systems. Descriptive Geometry. What is descriptive geometry ?.

Representation Systems
E N D
Presentation Transcript
Whatisdescriptivegeometry? • The construction of the majority of the objects around us (houses, motorcycles, televisions, telephones, computers, etc.) requires that these objects to be previously defined (design process) and subsequently represented with exact precision on plans (objective description of the form).
Are theseobjectstwo-dimensional? • How can wedraw a three-dimensional object in a paper (2D)?
Descriptive geometry makes it possible to objectively represent objects and elements that pertain to the three-dimensional space on two-dimensional supports. • So, do you think that descriptive geometry affects our lives? • In what way? • Talk in groups of four people.
We can representobjectsbytherepresentationsystems. • Representation systems are graphic languages to link elements in 3D to elements in 2D and vice versa. They are a very important part of descriptive geometry. • These languages are universal. They can be understood all over the world.
Representation systems are based on the projections of the geometrical three-dimensional elements on plans. The projections vary according to the representation system. • It is as if we take a photo of the object and we print it out.
TYPES OF PROJECTIONS • We can projecttheobjects in differentways: • ORTHOGONAL PROJECTION • OBLIQUE PROJECTIONS • CONIC PROJECTIONS IN GREEK ORTHO= 90 Degrees GONAL= angle
PARALLEL ORTHOGRAPHIC PROJECTIONS • Used in technicaldrawings
CLASSIFICATION OF THE REPRESENTATION SYSTEMS DIEDRIC .- Uses parallelorthographicprojections AXONOMETRIC: Uses parallelorthographicprojections. (ISOMETRICisthevariation of theaxonometricsystemthatwe are goingto use) CAVALIER PERSPECTIVE.- Uses obliqueparallelprojections CONIC: Uses conicprojections RepresentationSystems
Gaspar Monge • (1746–1818) was a French mathematician, a revolutionary, and the inventor of descriptive geometry, the theoretical basis on which technical drawing is based. During the French Revolution he served as a minister of the Marine and was involved in the reformation of the French educational system, founding the ÉcolePolytechnique.
FIRST QUADRANT SECOND QUADRANT VERTICAL PLANE HORIZONTAL PLANE GROUND LINE FOURTH QUADRANT THIRD QUADRANT
Representationof anobject Vert.projection Observer Horizontal projection
a´ a
Elevationor Front view Representation of theviews of anobject Leftsideview Plan or top viiew
In general, perspectives aim to represent three-dimensional objects in a single view or projection ,allowing the viewer to clearly see how the object is in reality.
ISOMETRIC PERSPECTIVE Z • This system is composed of three planes forming a trihedral (XOY, YOZ and ZOX), which is projected, forming the same angle, onto the drawing plane. This gives us the isometric perspective. In other words, it is the corner of a cube. o Y X
Howtopassfromdiedricsystemtoisometric Z Front view Left side view o Plan X Y Front view
Onepointperspective • Withconicperspectivewe can drawrealitythewayweseeit. • Itisjustthewaythat a camera captures reality. • Conicperspectiveis a methodthatgivesusthesensation of distance and depth in a flat support. • Itisanopticalillusion.
Onepointperspective • First rule: • Whenwe look at a group of parallellinesthat escape and wewanttodrawthem, we do notdrawthemparallel, butinstead wedrawthemmeeting at onepoint. • Wecallthispointthevanishingpoint.
Basic elements in linear perspective • Point of view: Itistheobserver’seye. • Horizon line: Theheight of this line coincides withtheheight of thepoint of view. • Ground line: Itis a theoretical line thathelpustodrawthe figures. Thedistancebetweenthehorizon line and theground line istheheight of theobserver. • Vanishingpoint: Itisalwaysonthehorizon line. • Distancepoints: They are thevanishingpoints of thelinesthatform 45º withtherepresentationplane
(P.V.) Distancepoints Horizon line Height of thepoint of view Vanishingpoint Ground line Areawherewe place theobjects thatwewanttodrawfrom top view
Example: Drawing a chessboard in onepointperspective (P.V.) V.P. Horizon line Ground line
Example of howtoriseanobject (P.V.) Horizon line Ground line
Summary • Descriptivegeometryrepresents 3D objects in a paper (2D) • Thefoursystems of representation are: • DIEDRIC SYSTEM fortechnicaldrawings • ISOMETRIC SYSTEM giveusan idea of howtheobjectis in 3D (perspective of theobject) • CAVALIER SYSTEM thesame • LINEAR PERSPECTIVE (CONIC PERSPECTIVE) is a perspective of theobject as weseeit