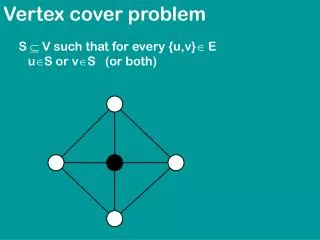

Maximizing Sensor Coverage Time in Scheduling Alon Efrat, AT&T Labs, Sensors Monitoring Regions
E N D
Presentation Transcript
The Sensor Cover Problem Alon Efrat (U. Arizona) Adam Buchsbaum (AT&T Labs) Shaili Jain (Harvard) Suresh Venkatasubramanian (AT&T Labs) Ke Yi (AT&T Labs) AT&T Labs
Sensors • Low-power devices with sensing capabilities • Sensors monitoring regions • We would like to cover a given region for as long as possible • Since sensors have limited life, we need to schedule sensor uptime to maximize coverage time AT&T Labs
Preemptive and Non-preemptive • Preemptive: Sensors can be turned on and off multiple times, and the total duration is constrained by battery • Non-preemptive: Each sensor can be turned on only once, and then it runs till death AT&T Labs
Problem Definition • A sensor s is defined by a regionR(s) U and a durationd(s). • A schedule for a sensor is an assignment of a start time t(s), so that the sensor is active for all t(s)tt(s) + d(s). • A point xU is covered at time t if there is some active sensor s at time t such that x R(s). • Problem: Given n sensors defined by (Ri , di), i [n], schedule all sensors so that U is covered for all 0 t T, and T is maximized. AT&T Labs
Prior Work • Previous work assumes that U is an arbitrary finite set, Ri’s are arbitrary subsets of U, and di = 1 (Set Cover Packing) • (log n)-approximation [Feige et al. 02] • Various heuristics in the networks community Does geometry help? AT&T Labs
1-D: Restricted Strip Covering • Each sensor covers an interval • Problem: Slide rectangles up and down to cover a rectangular area of maximum height LoadL = 5 3 3 2 2 5 5 3 4 5 2 4 AT&T Labs
Restricted Strip Covering: Related Results • Packing instead of covering: The dynamic storage allocation problem • (2+)-approx. [Buchsbaum et al. ’04] • Further allow rectangles to move both vertically and horizontally: Strip packing • (1+)-approx. [Kenyon and Remila ’00] AT&T Labs
Our Results AT&T Labs
An Easy Start: Uniform Duration • A greedy algorithm can achieve optimal solution of duration L AT&T Labs
Variable Durations: NP-hard O(log n) 2004 O(log log n) 2005 O(log log log n) 2006 AT&T Labs
Roadmap to “Triple-Log” • Dynamic programming for small L • Find the optimal schedule in O(nLO(L)) time • Poly time for L = O(log n / log log n) • (1+)-approx. for L < c1dmin log n / log log n • The “grouping” technique for large L • (1+)-approx. for L > c2dmax log n • Combine the two techniques to get an O(log log log n)-approx. for L in between AT&T Labs
Dynamic Programming i=1 i=2 • Check if T is achievable • Try all T=1,2,…,L • At any x-coordinate i, consider all possible schedules of sensors covering i. • Mark a state “valid” if there is previous compatible valid state … AT&T Labs
Dynamic Programming Analysis i=1 i=2 • A crude analysis yields an nO(n) bound • Observation 1: at most 2T sensors in any state • Observation 2: can skip x-coordinates where there are >5T sensors • # states per step: • total running time is O(nLO(L)). … AT&T Labs
Dynamic Programming Analysis • An exact solution for L = O(log n / log log n) • (1+)-approx. for L < c1dmin log n / log log n (by truncating) • Replace di by • New L’ < c1/ ∙ log n / log log n • Run the dynamic program AT&T Labs
Roadmap to “Triple-Log” • Dynamic programming for small L • Solves the problem in O(nLO(L)) time • (1+)-approx. for L < c1dmin log n / log log n • The “grouping” technique for large L • (1+)-approx. for L > c2 / 5 ∙dmax log n • Combine the two techniques to get an O(log log log n)-approx. for L in between AT&T Labs
The Grouping Algorithm • Basic idea: group short sensors into longer sensors, then apply the greedy algorithm • Need to bound the amount wasted wasted AT&T Labs
Grouping Sensors Stabbed by a Common Anchor Lnew(x) = Lold(x) / (1+) - 4D/ D: height of new sensors AT&T Labs
Partitioning • A -grouping is a partition of sensors into a number of subsets such that: • Sensors in a subset are stabbed by a common anchor • For any x-coordinate i, the set of sensors live at i are drawn from no more than subsets • Lemma: We can group a set of unit-duration sensors into sensor with duration D such that Lnew(x) > Lold(x) / (1+) - O(D / ) AT&T Labs
Partitioning for a Set of Intervals • = (log n) for a general set of intervals • = 2 for non-nested intervals AT&T Labs
The Algorithm AT&T Labs
The Algorithm • By repeatedly applying the lemma to make all sensors have equal duration • Theorem: For sufficiently small positive , there is a poly-time algorithm that gives a schedule of duration at least L/(1 + ) - O(dmax / 4). • Corollary: There is a constant c2, such that the algorithm gives a schedule of duration at least L/(1 + ) when L > c2dmax / 5. AT&T Labs
Roadmap to “Triple-Log” • Dynamic programming for small L • Solves the problem in O(nLO(L)) time • (1+)-approx. for L < c1dmin log n / log log n • The “grouping” technique for large L • (1+)-approx. for L > c2dmax/ 5 ( = O(log n)) • Combine the two techniques to get an O(log log log n)-approx. for L in between AT&T Labs
Putting Pieces Together • Consider the case when = O(1). • Fix parameter = 5/(c2). Partition sensors into blue set of those with duration >L (large) and red set of the rest (small). • For each x-coordinate, one of the sets has load at least L/2. Use each set to cover those x-coordinates where it has the load. • Dynamic programming for the blue set gives solution of duration L/(2(1 + )). • Grouping for the red set gives same result. • Putting solutions together gives a schedule of duration L/(2 + 2). AT&T Labs
The General Case • Set h = L log log n / log n; fix parameter l. • Partition sensors: • R0 gets large sensors, of duration > h. • Ri for i = 1, …, l gets middle sensors, of duration [h/2i, h/2i-1); truncate to h/2i . • R +1 gets small sensors, of duration < h/2l = L log log n/(2l log n). • For each x-coordinate, one of the sets has load at least L/(l + 2). Use each set to cover those x-coordinate where it has the load. • Dynamic programming for R0 gives solution of durationL/((1 + )(l + 2)). • Greedy on the middle Ri ’s gives solution of duration L/(2(l + 2)). • Grouping for Rl +1 with = 1 gives solution of duration Choose l= O(log log log n) AT&T Labs
Conclusion and Open Problems • 1D: • For non-nested intervals, (2 + )-approx. • General case: O(log log log n)-approx. We conjecture that constant approx is possible. • 2D: • O(log(ndmax / L))-approx. • Not much better than the O(log n)-approx. for the arbitrary-set version • Can we improve? AT&T Labs
More Open Problems • Preemptive Schedules • 1D: Can be solved exactly using max-flow • Load = Duration of optimal preemptive schedule • 2D: NP-hard • No approximation known • Sensor networks connectivity AT&T Labs
Thank you! AT&T Labs