MDI Measurement Errors: The Magnetic Perspective
530 likes | 552 Vues
This technical note analyzes MDI errors and data challenges from a magnetic viewpoint, with implications for helioseismology studies. Explore line profiles, model dependency, and the impact of magnetic strength on velocity measurements.

MDI Measurement Errors: The Magnetic Perspective
E N D
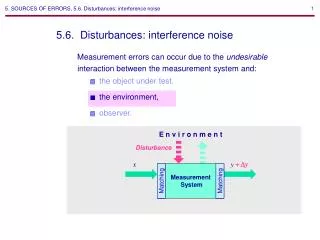
Presentation Transcript
Zasshikai 2004.07.12 S.UeNo MDI Measurement Errors: The Magnetic Perspective Y. Liu & A.A. Norton SOI-Technical Note 01-144
Zasshikai 2004.07.12 S.UeNo Contents Introduction Line Profiles and Model Dependency Low Light Levels Scattered Light Filtergram Cadence Sensitivity (not include instrumental polarization)
Zasshikai 2004.07.12 S.UeNo This Tech Note addressed MDI error analysis and data difficulties from the magnetic perspective. Nevertheless, results are applicable to helioseismology studies. Introduction
Zasshikai 2004.07.12 S.UeNo 2. Line Profiles and Model Dependency MDI uses the spectral line Ni I 6767.772Å z3P0 at 3.6576 eV → a1S at 1.8262 eV Zeeman splitting by 30.5 mÅ/kG (g=1.426) Computing of line profiles from (basically) Unno-Beckers equations Model stmosphere: the Harvard-Smithsonian Reference Atmosphere (HSRA) An index that is obtained from intensities sampled at four positions is calibrated to velocity using a look-up-table (see section 3.).
Zasshikai 2004.07.12 S.UeNo Fig.1-1 Stokes parameters calculated from HSRA model.
Zasshikai 2004.07.12 S.UeNo Fig.1-2
Zasshikai 2004.07.12 S.UeNo Simulation shows that using circular polarization to measure velocity (Fig.2) is much better (much accurate) than using linear polarization to measure velocity (Fig.3), dynamic range of circular polarization is a little bit smaller than dynamic range of linear polarization, when magnetic strength is large (Fig.4). When |B| < 2000 G, the error of velocity measurement < 15 % using linear polari. < 5 % using circular polari.
Zasshikai 2004.07.12 S.UeNo Fig. 2 Velocity error vs. real velocity using circular polarization and HSRA model.
Zasshikai 2004.07.12 S.UeNo Fig. 3 Velocity error vs. real velocity using linear polarization and HSRA model.
Fig. 4 Calibrated velocity vs. real velocity Zasshikai 2004.07.12 S.UeNo
Zasshikai 2004.07.12 S.UeNo Fig. 5 Magnetic field error vs. velocity using HSRA model. Generally, the error of magnetic field measurement < 10 % but, the error dramatically increases when velocity exceeds a certain value.
Zasshikai 2004.07.12 S.UeNo These simulations are model dependent. When a sunspot model (Maltby et al. 1986) is used, the measurement accuracy using linear polarization becomes much better.
Fig. 6-1 Stokes parameters calculated from Maltby sunspot model.
Fig. 7 Calibrated velocity vs. real velocity using Maltby model.
Summary of this section • The velocity and magnetic field measurements have • satisfied accuracy if |B| < 2000 G. • (Max of solar rotation velocity ~ 2.0 km/s • Max of satellite speed: ~ 0.60 km/s • so, Max of MDI’s background velocity : 2.6 km/s) • Generally, • * The velocity field is underestimated about 5 %. • * The magnetic field is underestimated about 15 % • In umbra, • The velocity & magnetic field are underestimated about • 20-30% (when the sunspot is near solar center). • The scattered light and focus problem will make the error higher. • If |B| > 3000 G, • the measurement accuracy from circular polari. is acceptable • only in low velocity zone, • the measurement accuracy from linear polari. is questionable.
According to recent study by Berger and Lites (2003), (Magnetic flux density of MDI) / (Magnetic flux density of ASP) = 0.64 - 0.71 (nearly constant)
3. Low Light Levels MDI data had the proven problem in some sunspot umbra; “Drastical decreasing of the magnetic flux” . For years, the reason of this effect is considered as “saturation” of +V and -V profiles from the wavelength sampling range due to large vdoppler and large |B|. ⇩ This explanation proved incorrect.
Fig. 8 “Saturation” effect in a northern hemisphere sunspot (Dec1999)
Fig. 9 The alpha LUT & The shift of center wavelength (dλ) vs. MDI calibrated velocity etc. when |B| = 0 G
Fig. 10 The alpha LUT & The shift of center wavelength (dλ) vs. MDI calibrated velocity etc. when |B| = 3000 G
Fig. 12 “Saturation” effect at hi-resolution mode. Fig. 11 “Saturation” effect at Full-disk mode. 1999 Dec 24th 1999 Dec 24th
All datapoints which showed the “saturaton” effect had extremely low intensity values|. Contamination with scattered light? ⇩ “Line Profile” campaign observation conducted on 20 May 2000. ⇩ Scattered light is very small. Different B-values are obtained between MDI on-board processing algorithm and MDI simulation on the ground.
Fig. 13 Comparison of Line Profile campaign data to the MDI magnetogram.
Two reasons were discovered as follows; A floating point calculation was contained in the on-board algorithm. When the intensity gets very small and/or the line gets weak, the LUT value saturates. So, the “alpha” will be too small. Then, the velocity and magnetic field will also be too small by several hundred m/s, ~ one thousand G. → After the program was modified to do the calculation in 16-bit shorts as well as in doubles, the “saturation” was decreased. 2) Shallow line depth. When the line depth decreases as fraction of continuum, the velocity table is wrong and the velocity will too small generally by some hundreds of m/s. (due to the difference between quiet region model and sunspot model.)
MDI’s indeces for LUT. When S0>0, generally, the range of S1 was expected 100 to 1000 (continuum is about 3000). But, when S2 < S1 < 96, the LUT value shows saturates (at 32767).
Fig. 14 Intensity profiles of a sunspot at 4 wavelengths in the Line Profile campaign.
Fig. 15 Calibrated velocity’s dependency of intensity and line depth by old algorithm.
4. Scattered Light Motivation of the investigation into scattered light: To understand “saturation” effect of umbral data. From the continuum intensity map, PSF including scattered lights was estimated. ⇩ Scattered lights of each intensity map were removed by using this PSF. ⇩ Magnetic field was calculated with MDI on-board algorithm. ⇩ Similar “saturation” effects were shown. ⇩ Scattered light was not the primary problem in umbral “saturation”.
Fig. 16 Theoretical limb-darkening function (Pierce & Slaughter 1977) and observed limb profile. Estimated PSF including scattered light. Comparison to MDI instrumental PSF (Rabello-Soares et al. 2001).
Fig. 17 Artificially saturation removed magnetogram. Scattered light removed intensity map. X-slice profiles. Recreated saturation effect & original MDI magnetogram.
5. Filtergram Cadence MDI time cadence for 1 series: ~ 30 sec (I1(I+V), I1(I-V), I2(I+V), I2(I-V), I0, I3(I+V), I3(I-V), I4(I+V), I4(I-V), I0 × 3sec, or I0, I1(I+V), I2(I+V), I3(I+V), I4(I+V), I4(I-V), I3(I-V), I2(I-V), I1(I-V), I0 × 3sec.) Examination of errors introduced by the filtergram cadence. 1) making artificial Stokes I & V-profiles with the simulation ( |B|=2000 G ). 2) generating an artificial sinusoidal velocity field (P=300s, A=90m/s, ignoring the mode-combination of solar oscillations) 3) simulating of MDI measurement with the transmission profile shifted avery 3 sec.
Fig. 18 Cadence effect. Simulation & observation. Simulation: B also oscillates (P=300 sec, A= ~5 G, 90° phase lag) Observation: Time variation of velocity and magnetic field where averaged B is 1355 G *A >> 5 G, phase lag is not 90°
Fig. 19 Observed MDI’s B oscillation & expected B oscillation due to cadence effect It does not appear that the MDI’s B oscillation is heavily contaminated by this effect.
Fig. 20 Expected amplitudes of MDI’s B oscillation introduced by measurement cadence vs. amplitudes of input velocity time variation, and dependency of magnetic field strength. Symbols stand for observed amplitudes with MDI on Nov.10 1999. (A bipolar active region in the hi-resolution mode.)
Conclusions of this section MDI filtergram cadence imparts an oscillatory component to the magnetic field strength. Oscillatory component to field strength always has a phase value of (v, dB)=-90°. The maximum introduced RMS amplitude is a function of velocity amplitude and field strength, the realistic errors (amplitudes) are on the order of 5/2000 G or 0.25% The cadence effect also makes the velocity values have errors (~20%) The observed magnetic variation is not consistent with expected variation. It does not show the predictable phase and often appears to be independent of the velocity and have large amplitudes when the velocity does not so.
According to “Systematic errors in measuring solar magnetic fields with a FPI spectrometer and MDI” By A. Settele, T.A. Carroll, I. Nickelt, and A.A. Norton, A&A 386, 1123-1128, 2002 ◎ Mean magnetic field strengths were overestimated by the simulation by up to 8 %. ◎ The velocity offset increases → the error increases for large B → the error decreases for small B Shorter periods of oscillation → slightly larger errors ◎ The characteristics of observed magnetic field strengths is rather different from those predicted by the simulation. The temporal behaviour of MDI magnetic data is not dominated by this effect. ◎ By using the observed velocities and mean magnetic fields, this error can be reduced or removed.; If the original velocity time series is perfectly reproduced by this simulation, one should subtract the artificial magnetic field time series from the one of the observed data. / If it is not perfectly reproduced but the power spectra is still correct, one can subtract the power spectra of the artificial magnetic field oscillation from the observed one.
Moreover, investigation in the case of Fabry-Perot interferometer spectrometer, for example, VTT at Tenerife.
6. Sensitivity MDI shutter noise (uncertainty of exposure time) : 10 - 15 μs (RMS) → a certain background B value (offset) * Estimate of this offset by using Gaussian fitting method - Assuming the small value data in magnetogram are purely noise and have a gaussian distribution. - The shift of the gaussian center would be the “offset” induced by shutter noise.
Fig. 21 Fitting examples using different fitting functions. Every center values are similar in 0.1G resolution. Half-width of this noise function is; 16.1 G for 1min magnetograms 9.7 G for 5min magnetograms
Fig. 22 Magnetic mean field and offset vs. the maximum B value. Magnetic mean field and offset vs. the size of target region. The offset almost keeps constant.
Fig. 23 • MDI mean field • strength of full- • disk. • - Raw offset. • Offset without • long-term • variation. • Corrected mean • field strength. • Shutter noise introduces a 0.5 G • uncertainty.
Fig. 24 Difference between 5min magnetogram and 1min magnetogram. Offset of 5min magnetograms are systematically 0.46 G lower than 1min magnetograms.
Conclusions of this section • The small value magnetic field strength (between -50 to 50 G) in MDI magnetogram are almost noise, and it have a gaussian distribution. • Shutter noise appears as “offset”. So, it can be corrected. • “Offset” values are about -0.5 to +0.5 G for 1min magnetograms about -1.0 to +0.0 G for 5min magnetograms
According to “CORRECTION OF OFFSET IN MDI/SOHO MAGNETOGRAMS” By Y.Liu, X. Zhao and J.T. Hoeksema Sol.Phys. 219, 39-53, 2004 Moreover, ◎ The yearly median value of the “offset” of 1min magnetograms; 1996, 1997, 1998, 1999, 2000, 2001, 2002 0.251, 0.268, 0.273, 0.285, 0.391, 0.352, 0.364 [G] They believe the increase is related primarily to increased noise in the shutter noise. ◎ This offset influences various distributions, such as “neutral lines”, “the locus of the computed heliospheric current sheet”, “foot points of calculated coronal holes”. This fact has shown potential to induce significant errors in prediction of the polarity of the interplanetary magnetic field and solar wind properties at the Earth for space weather forecasts.
Fig. 7 MDI magnetograms without “offset” correction. MDI magnetograms with “offset” correction. The corresponding Wilcox Solar Observatory (WSO) magnetograms. Left: 1997.10.04 (Solar minimum) Right: 2001.01.28 (Solar maximum) Black lines; magnetic neutral lines

![Reference: [1]](https://cdn2.slideserve.com/5172551/slide1-dt.jpg)