Download
1 / 1
10 likes | 788 Vues
Hand-Wheel Torque Hand-Wheel Torque Hand-Wheel Torque Hand-Wheel Torque 1 2 1 < 2 Ca 1 Ca 2 Ca 1 <Ca 2 V 1 V 2 V 1 <V 2 CS 1 CS 2 CS 1 <CS 2 Hysteresis Width Aligning Torque Hand-Wheel Angle Hand-Wheel Angle Hand-Wheel Angle

E N D
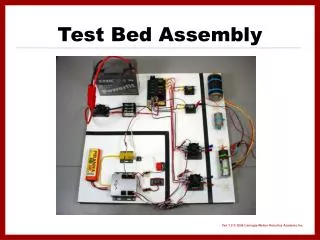
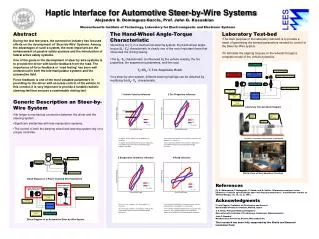
Hand-Wheel Torque Hand-Wheel Torque Hand-Wheel Torque Hand-Wheel Torque 1 2 1< 2 Ca1 Ca2 Ca1<Ca2 V1 V2 V1<V2 • CS1 • CS2 • CS1<CS2 Hysteresis Width Aligning Torque Hand-Wheel Angle Hand-Wheel Angle Hand-Wheel Angle Hand-Wheel Angle Front-Wheel Actuator VEHICLE DYNAMICS MODEL Straight-run Vehicle Velocity Aligning Torque Measurement Vehicle Velocity Rack Position Measurement Feedback Force Actuator CONTROL Hand-Wheel Angle Measurement Hand-Wheel Torque Measurement Laboratory Test-bed Block Diagram Pump Rotary Valve Pinion and Rack Upper Column Lower Column Cylinder and Piston Steering System (Slave Actuator) Aligning Torque Measurement Steering Wheel System (Master Actuator) Front Wheel Actuator Hand Wheel Torque Measurement Rack Position Measurement Feedback Force Actuator CONTROL Hand Wheel Angle Measurement Vehicle Velocity Haptic Interface for Automotive Steer-by-Wire Systems LEES Alejandro D. Dominguez-Garcia, Prof. John G. Kassakian Massachusetts Institute of Technology, Laboratory for Electromagnetic and Electronic Systems • Abstract • During the last few years, the automotive industry has focused efforts on the development of ‘Steer-by-Wire’ Systems. Among the advantages of such a system, the most important are the enhancement of passive safety systems and the introduction of lateral active safety systems. • One of the goals in the development of steer by wire systems is to provide the driver with tactile feedback from the road. The importance of force feedback or ‘road feeling’ has been well understood in both the tele-manipulator systems and the automotive field. • Force feedback is one of the most valuable parameters in providing for the driver with accurate control of the vehicle. In this context, it is very important to provide a tunable realistic steering feel that ensures a comfortable driving feel. • The Hand-Wheel Angle-Torque Characteristic • According to [1], in a mechanical steering system, the hand-wheel angle-torque (h- Th) characteristic is clearlyone of the most important items that influences the driving feeling. • The h- Th characteristic is influenced by the vehicle velocity, the tire properties, the suspension parameters, and the road. • In a steer-by-wire system, different steering feelings can be obtained by modifying the h- Th characteristic. • Laboratory Test-bed • The main purpose of the laboratory test-bed is to provide a mean of generating the sensed parameters needed for control of the Steer-by-Wire system. • To Simulate the aligning torques on the wheels through a complete model of the vehicle dynamics. Th=f(h , V, Tire, Suspension, Road) 1Vehicle Velocity Influence 2Tire Properties Influence • Generic Description an Steer-by-Wire System • No longer a mechanical connection between the driver and the steering system. • Significant similarities with tele-manipulator systems. • The control of both the steering wheel and steering system rely on a unique controller. • At higher vehicle velocity (V), the gradient Th/hincreases. • At higher vehicle velocity, the hysteresis width of the Hand-Wheel Torque for zero Hand-Wheel Angle becomes narrower. • As the Cornering Stiffness (CS) of the tire increases, the gradient Th/hincreases. • As the Cornering Stiffness, the hysteresis width of the Hand-Wheel Torque for zero Hand-Wheel Angle increases. 3Suspension Geometry Influence 4Road Influence Partial View of the Laboratory Test-bed Block Diagram of a Power Assisted Steering System References [1] H. Shimomura, T. Haraguchi, Y. Satoh, and R. Saitoh, “Simulation analysis on the influence of vehicle specifications upon steering characteristics”, International Journal of Vehicle Design, vol. 12, no. 2, 1991. Acknowledgments F. Luis Pagola, Professor of Electronics and ControlUniversidad Pontificia Comillas, Madrid, Spain. T. A. Keim, Principle Research Engineer Massachusetts Institute of Technology, Cambridge, Massachusetts. John F. Banzhaf Northeastern University, Boston, Massachusetts. This research has been fully supported by the Sheila and Emanuel Landsman Fund • As the Caster increases (Ca), the gradient Th/hincreases. • As the Caster increases, the hysteresis width of the Hand-Wheel Torque for zero Hand-Wheel Angle decreases. • As the Friction Coefficient () between the tire and the road increases, the gradient Th/hdecreases. • As the Friction coefficient between the tire and the road increases, the hysteresis width of the Hand-Wheel Torque for zero Hand-Wheel Angle becomes narrower. Block Diagram of an Automotive Steer-by-Wire System