Download
1 / 6
60 likes | 140 Vues

E N D
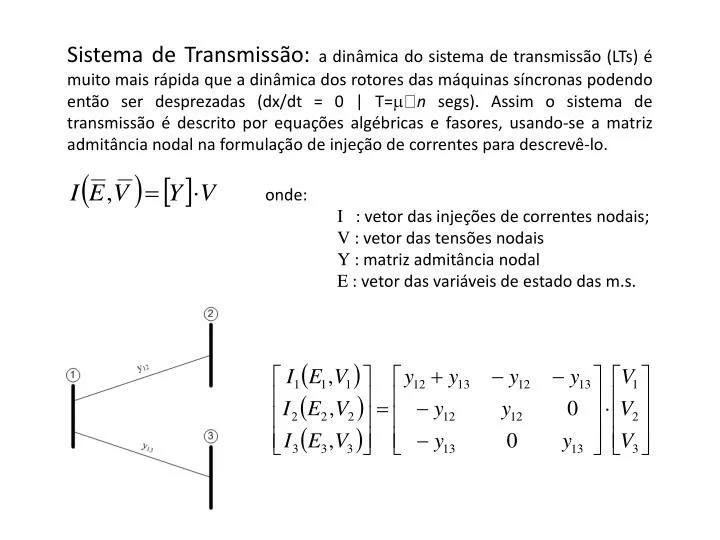
Sistema de Transmissão: a dinâmica do sistema de transmissão (LTs) é muito mais rápida que a dinâmica dos rotores das máquinas síncronas podendo então ser desprezadas (dx/dt = 0 | T=n segs). Assim o sistema de transmissão é descrito por equações algébricas e fasores, usando-se a matriz admitância nodal na formulação de injeção de correntes para descrevê-lo. onde: I : vetor das injeções de correntes nodais; V : vetor das tensões nodais Y : matriz admitância nodal E : vetor das variáveis de estado das m.s.
Cargas: em geral a representação das cargas é feita usando-se modelos que refletem o seguinte comportamento. • Potência Constante: a carga não varia com a tensão, continua fixa independente do valor da tensão da barra. Esta hipótese é valida para estudos com um horizonte de tempo muito grande (o nível da tensão é restabelecido aos níveis normais pela ação dos controles automáticos ou dos operadores). • Corrente Constante: o módulo da corrente não varia com a tensão, isto produz uma variação da potência linearmente com a tensão. • Impedância Constante: a carga é representada por uma impedância conectada na barra, isto produz uma variação da potência proporcional ao quadrado da tensão.
Modelo Dinâmico: na prática observa-se que a carga possui uma dinâmica própria em estudos de estabilidade sendo alguns modelos que representam este efeito propostos na literatura. Dificuldades na obtenção dos parâmetros deste modelo impediram o seu uso nos programas atuais
Efeitos do modelo de carga em estudos de estabilidade • Potência Constante aumentar as oscilações do sistema (+ instável): • Perturbações no sistema tendem a diminuir as tensões nas barras, com isso para manter Scte = V.I, a corrente da carga aumenta, aumentando mais as quedas de tensão na rede (V=Z.I), e forçando os geradores a injetar mais potência. • a hipótese de Pcte não pode ser sustentada para toda a rede: c.c. V=0; para manter Scte = V=0 . I= (programas computacionais sustentam esta hipótese para um determinado nível de tensão, usualmente > 0.7 pu) • Impedância Constante reduzir as oscilações do sistema (+ estável): • A diminuição das tensões durante as perturbações reduzem também as correntes das cargas (I=Y.V) aliviando os geradores Atenção, isto é só uma tendência
Área “A” Área “B” • muita geração • pouca carga • pouca geração • muita carga Distúrbios na interligação causam quedas de tensão em ambas as áreas, na Área “A” com mais geração que carga as máquinas aceleram (wP). Cargas representadas como Pcte em “A” não estão sujeitas a variação de tensão e contribuem para segurar a aceleração das máquinas síncronas; se as cargas fossem representadas como Zcte em “A” reduziriam a potência quadraticamente com a tensão e aumentariam o desbalanço geração-carga. Na área “B” a situação se inverte, o modelo Zcte contribui para a estabilidade do sistema.
Modelos de carga • Modelo Polinomial: • Modelo Exponencial: • normalmente: • a1 + b1 + c1 = 1 • a2 + b2 + c2 = 1 • normalmente: • Kp = 0 3 • Kq = 0 3